



Анализ применения радиотехнических систем (РТС), размещаемых на беспилотных летательных или малогабаритных космических аппаратах (БПЛА), показал преимущества использования малогабаритных радиолокационных станций с синтезированной апертурой антенны (РСА) по причине возможности всепогодного и круглосуточного мониторинга заданных районов земной и водной поверхности.
В то же время РСА обладает ограниченными возможностями по идентификации объектов и малой дальностью действия.
Применение РТС, в том числе совместно с РСА, сможет позволить: устранить ограниченные возможности по идентификации объектов и малую дальность действия; повысить достоверность и полноту добываемых сведений; определять координаты и идентифицировать источники радиоизлучения (ИРИ) на значительном удалении от трассы полета [1].
Известны многопозиционные методы определения местоположения источников радиоизлучения (ИРИ), в том числе разностно-дальномерные методы (РДМ) [2–4], которые предполагают наличие множества приемных пунктов на базе БПЛА с обеспечением их взаимодействия над контролируемой территорией, что не всегда может быть обеспечено.
Кроме того, увеличение количества задач, возлагаемых на РТС, входящих в состав БПЛА, влечет за собой: увеличение взлётной массы; ужесточение требований к компонентам питания; сокращение максимально достижимого времени нахождения БПЛА в воздухе.
Следовательно, разработка способов определения местоположения ИРИ, позволяющих сократить количество приемных пунктов, размещаемых на БПЛА, и уменьшить массогабаритные параметры РТС, является актуальной задачей.
Цель исследования: разработка способа определения местоположения ИРИ разностно-дальномерным методом одиночной подвижной РТС на основе формирования копии сигнала.
В рамках данной работы вопрос точности определения местоположения ИРИ не рассматривается.
Материалы и методы исследования
Рассмотрим возможность определения местоположения ИРИ разностно-дальномерным методом одиночной подвижной малогабаритной РТС.
Известен и всесторонне изучен разностно-дальномерный метод, где линия (или поверхность) положения формируется на основе разности расстояний от ИРИ до позиций приема разнесенной в пространстве многопозиционной РТС. При решении задачи на плоскости минимально должно быть три позиции, в пространстве – минимально четыре позиции [2–4].
Ограничимся рассмотрением задачи определения местоположения ИРИ на плоскости с подвижной РТС воздушного и/или космического базирования, при этом расстояние до ИРИ много больше высоты полета.
Рассмотрим сущность предлагаемого способа, схема которого представлена на рис. 1.
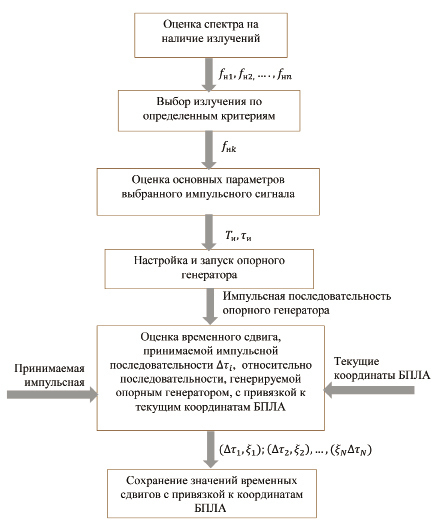
Рис. 1. Схема работы предлагаемого способа
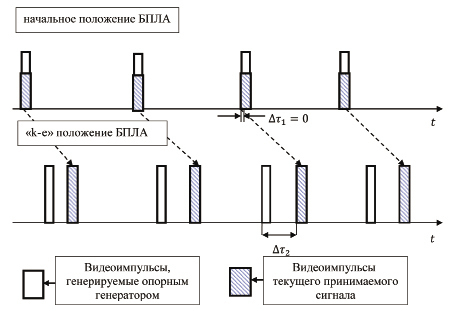
Рис. 2. Вариант расположений импульсных последовательностей в начальном положении и очередном «k-м» положении БПЛА
В начале рабочего участка траектории БПЛА осуществляется оценка спектра на наличие излучений, результатом которой становится набор грубых оценок несущих частот (fн1, fн2, …., fнn) ИРИ. Далее по определенным критериям выбирается сигнал ИРИ с частотой (fнk).
РТС, перемещаясь по траектории полёта БПЛА, осуществляет оценку основных параметров (Tи, τи) выбранного импульсного сигнала ИРИ.
На основе измеренных параметров ИРИ настраивается и запускается опорный генератор РТС, формирующий в момент запуска импульсную последовательность опорного генератора – точную копию принимаемого сигнала ИРИ с нулевой временной задержкой (Δτ1) относительно выбранного сигнала ИРИ (рис. 2).
При перемещении РТС на базе БПЛА по заданной траектории, временная задержка между сигналом опорного генератора и текущим принимаемым сигналом будет изменяться, и при изменении местоположения РТС на базе БПЛА на определенное значение («k-ое» положение БПЛА) текущая временная задержка между импульсными последовательностями (Δτ2) измеряется с определенной точностью с привязкой к координатам БПЛА.
При дальнейшем увеличении временного сдвига, когда он превосходит период повторения импульсной последовательности, возникает неоднозначность в оценке. На рис. 3 наглядно показана ситуация, что вычисление временного сдвига без подсчета количества целых значений периода (Δτ'2) будет некорректным таким образом, Δτ2 – истинное значение временного сдвига между последовательностью, генерируемой опорным генератором, и принимаемой последовательностью.
Аналогично классической схеме РДМ, «k-е» или «i-е» положение БПЛА соответствует положению очередного приемного поста в многопозиционной РТС с известными координатами, следовательно, также необходимо в момент вычисления временного сдвига фиксировать собственные координаты БПЛА для возможности дальнейшего расчета местоположения ИРИ.
Таким образом, множество измеренных значений временных задержек с соответствующими координатами БПЛА, является аналогичным массиву исходных данных в классическом разностно-дальномерном методе [3–5].
Рассмотрим вариант структурно-функциональной схемы РТС, в которой может быть реализован предлагаемый способ.
Исходя из требования малогабаритности РТС, целесообразно минимизировать вычислительные возможности аппаратуры, размещенной в РТС на базе БПЛА, следовательно, необходимо разделение РТС на воздушную и наземную компоненты. Основные расчетные процедуры осуществляются на вычислительных возможностях наземного компонента РТС.
Результаты исследования и их обсуждение
Рассмотрим подробно вариант структурно-функциональной схемы воздушного компонента РТС (рис. 4).
Начнем рассмотрение с антенной системы, которая по причине отсутствия необходимости узкой диаграммы направленности может иметь небольшие массогабаритные параметры с рабочим диапазоном частот от 1 до 18 ГГц. Для уменьшения влияния других излучающих радиоэлектронных средств БПЛА, работающих совместно с воздушным компонентом РТС, необходимо минимизировать уровни боковых лепестков диаграммы направленности антенной системы.
Широкополосный приемник с малошумящим усилителем (МШУ) обеспечивает: усиление и прием сигналов ИРИ с полосой пропускания до 500 МГц; грубую оценку несущих частот сигналов ИРИ и подачу их на вход модуля принятия решения для выбора интересующей несущей частоты ИРИ.
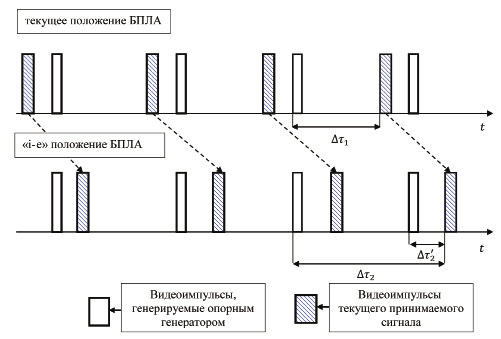
Рис. 3. Вариант расположений импульсных последовательностей в текущем положении и очередном «i-м» положении БПЛА, при котором возникает неоднозначность в оценке временного сдвига
На основе команды от модуля принятия решения широкополосный приемник и МШУ настраивается согласно выбранным параметрам. Далее после приемника сигнал на выбранной частоте поступает на модуль преобразования, селекции и детектирования, где осуществляются следующие процедуры:
– преобразование сигнала на промежуточную частоту для возможности использования малогабаритной и более простой аппаратуры в процессе дальнейшей обработки сигнала;
– дополнительная фильтрация и селекция сигнала на промежуточной частоте;
– выделение огибающей импульсов (амплитудное детектирование) для дальнейшего измерения амплитудных и временных параметров сигнала.
Из модуля преобразования, селекции и детектирования поступают следующие сигналы:
– продетектированный сигнал τвид на вход модуля оценки параметров для измерения амплитудных и временных параметров сигналов;
– τвид на вход модуля измерения временного сдвига.
В модуле оценки параметров осуществляется дискретное цифровое измерение амплитудно-цифровых параметров видеосигналов.
На основе измеренных амплитудно-цифровых параметров сигнала осуществляется настройка и запуск опорного генератора, который генерирует импульсную последовательность с идентичными параметрами.
Генерируемая последовательность, как и текущая принимаемая последовательность, поступает на вход модуля измерения временного сдвига.
Через определенное время, которое определяется, исходя из условий определения местоположения ИРИ в конкретном случае, на модуле измерения временного сдвига на основе поступающих продетектированных сигналов от опорного генератора и текущего принимаемого сигнала, поступающего от модуля преобразования, селекции и детектирования, вычисляется временная разница между импульсными последовательностями, которая отправляется на модуль формирования координатной информации.
Кроме того, в момент поступления очередного значения временных сдвигов с модуля навигации считываются текущие координаты БПЛА, и эти соответствующие пары значений записываются в устройство хранения информации.
Дальнейшая обработка осуществляется на наземном компоненте РТС (рис. 5). Для управления полетом БПЛА в наземном компоненте РТС предусмотрено наличие антенной системы и специального программного обеспечения (СПО) управления полётом БПЛА, которое позволяет осуществлять подготовку к полёту, проверку систем БПЛА, планирование маршрута полета, непосредственное управление БПЛА во время полета и получение телеметрической информации о местонахождении БПЛА и состоянии его систем.
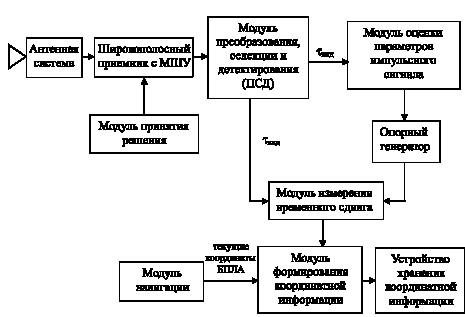
Рис. 4. Структурно-функциональная схема воздушного компонента РТС
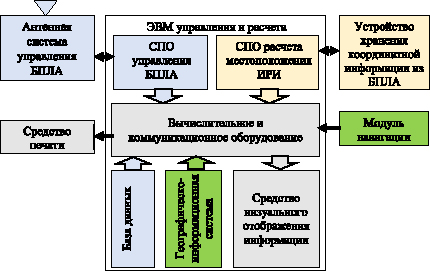
Рис. 5. Структурно-функциональная схема наземного компонента РТС
Для исключения нарушения конфиденциальности телеметрической информации и канала управления необходимо наличие СПО или аппаратных средств защиты передаваемой информации.
По окончанию полета БПЛА координатная информация, полученная во время выполнения задачи, считывается из устройства хранения БПЛА через соответствующий интерфейс ЭВМ управления и расчета.
СПО расчета местоположения ИРИ, входящее в состав ЭВМ управления и расчета, на основе координатной информации, включающей в себя временные задержки и координаты БПЛА, производит расчеты по определению местоположения ИРИ.
Для наглядного отображения оценки местоположения ИРИ, на основе географическо-информационной системы, текущая радиоэлектронная обстановка наносится на электронную географическую карту.
Параметры излучения и сведения о местоположении ИРИ сохраняются в базе данных, входящей в состав ЭВМ управления и расчета, с целью накопления и обобщения информации а также эталонного описания выявленных ИРИ.
Заключение
В результате проведенного исследования получены следующие результаты:
– предложен способ определения местоположения источника радиоизлучения разностно-дальномерным методом одиночной подвижной РТС на базе БПЛА, который может позволить сократить количество приемных пунктов, размещаемых на БПЛА, а также уменьшить массогабаритные параметры РТС;
– рассмотрен вариант структурно-функциональной схемы РТС, в котором может быть реализован предложенный способ;
– обозначены в общем виде требования к построению модулей РТС.
Библиографическая ссылка
Гурский С.М., Коликов И.В., Уткин В.В. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ РАЗНОСТНО-ДАЛЬНОМЕРНЫМ МЕТОДОМ НА ОСНОВЕ ФОРМИРОВАНИЯ КОПИИ СИГНАЛА // Современные наукоемкие технологии. – 2019. – № 10-1. – С. 44-49;URL: https://top-technologies.ru/ru/article/view?id=37695 (дата обращения: 27.04.2024).