



Технологии управления автономными транспортными средствами (АТС) активно развиваются в задачах горнодобывающей отрасли. Инженерные решения, методы, способы и подходы реализации управления наиболее часто базируются на применении систем машинного зрения, аппаратных средств определения препятствий, спутниковой навигации, искусственного интеллекта и построении карт маршрутов [1–3].
В публикациях [4, 5] авторы предлагают перспективное решение в задачах управления АТС, которое основывается на подсветке траектории движения лазерными световыми маркерами. Такой подход может быть дополнен применением радиопеленгации как способа определения направления движения на источник стационарного радиосигнала в условиях, препятствующих работе алгоритмам машинного зрения. В качестве такого источника может выступать контрольный пост (радиомаяк), определяющий в том числе и место остановки АТС, выполнение маневра в траектории движения и дальнейшей пеленгацией на следующий радиомаяк.
Цель работы состоит в определении вида модуляции сигналов с наилучшими точностными характеристиками при применении радиопеленгации в задаче организации движения АТС в качестве дополнения к работе алгоритмов позиционирования АТС в условиях потери управляющей системой на основе машинного зрения пространственной привязки к маршруту.
Материалы и методы исследования
В Федеральном государственном бюджетном научном учреждении «Федеральный исследовательский центр угля и углехимии Сибирского отделения Российской академии наук» (ФИЦ УУХ СО РАН) был апробирован способ радиопеленгации для ориентации подвижных объектов относительно стационарного источника радиосигнала. Реализация такого способа проводилась в несколько этапов, включая исследования видов модуляции сигналов, постановку эксперимента на лабораторном макете ориентации подвижных объектов методом пеленгации сигнала и проектирование схемы движения АТС на основе полученных экспериментальных данных точностных характеристик исследуемых видов модуляции для пеленгации.
Рассматривались три вида модуляции: амплитудная, которая имеет наименьшую сложность реализации; квадратурная фазовая (QPSK) и бинарная фазовая манипуляция (BPSK) – как наиболее помехоустойчивые [6, с. 472].
Результаты исследования и их обсуждение
По результатам моделирования в среде Simulink (табл. 1) для модуляций BPSK и QPSK были определены: коэффициенты ошибок модуляции MER (Modulation Error Ratio); вектор ошибки EVM (Error Vector Magnitude); отношения сигнал/шум SNR (Signal to Noise Ratio).
На рисунке 1 представлены результаты моделирования сигнальных созвездий при разных значениях отношения сигнал/шум.
Исходя из полученных результатов, можно сделать вывод, что с увеличением отношения сигнал/шум вектор ошибки стремится к минимальному значению, а коэффициент ошибок модуляции QPSK и BPSK принимает сопоставимо равные значения. Таким образом, на шаге моделирования рассмотренных видов модуляций подтверждаются ожидаемые качественные характеристики выбранных модуляций для задач пеленгации.
Экспериментальные исследования ориентации объекта на стационарный источник сигнала проводились на лабораторном макете, структурная схема которого представлена на рисунке 2. Определение направления на источник сигнала реализовано на базе алгоритма MUSIC (MUltiple Signal Classification). Такое решение в задаче пеленгации обусловлено возможностью алгоритма определить угловые направления прихода сигналов [7–9].
Аппаратное обеспечение лабораторного макета включает в свой состав передающее и приемное устройства на базе программно определяемой радиосистемы NI USRP 2901. Функциональные возможности передающего устройства позволяют выполнить генерацию сигналов в заданном диапазоне частот (950–970 МГц) амплитудной модуляции, квадратурной фазовой и бинарной фазовой манипуляции.
Таблица 1
Результаты моделирования
|
SNR, дБ |
MER, дБ |
EVM, % |
||
|
BPSK |
QPSK |
BPSK |
QPSK |
|
|
0 |
0,7 |
7,4 |
92 |
43 |
|
10 |
11 |
13 |
28 |
22 |
|
20 |
20 |
23 |
9 |
6 |
|
30 |
30 |
33 |
2 |
2 |
|
40 |
40 |
43 |
0,9 |
0,6 |
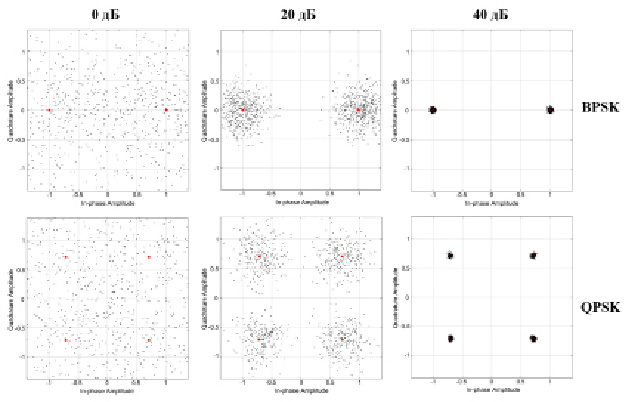
Рис. 1. Сигнальные созвездия для значений соотношений сигнал/шум 0; 20 и 30 Дб
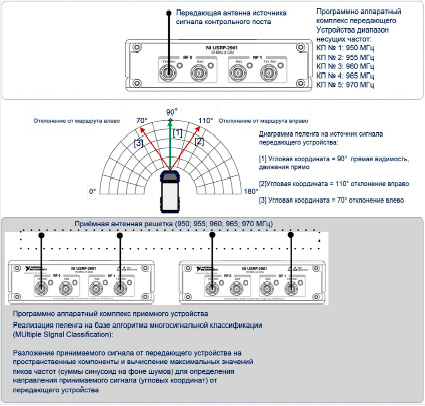
Рис. 2. Обобщенная структурная схема лабораторного макета ориентации подвижных объектов методом пеленгации сигнала
Приемное устройство обеспечивает демодуляцию сигнала заданных видов модуляции и при помощи алгоритма MUSIC определяет азимут угла ориентации на источник сигнала. Программная реализация алгоритмов выполнена в среде LabVIEW 2021.
Цель экспериментального исследования заключалась в поиске вида модуляции, которая позволяет определить направление движения объекта (приемное устройство) на стационарный источник сигнала (передающее устройство) с минимальными отклонениями азимута угла прихода сигнала при условиях прямой ориентации объекта на источник излучения сигнала.
Лабораторные исследования выполнялись на базе лабораторного прототипа системы ориентации подвижных объектов методом пеленгации сигнала по следующей методике.
1. Установка приемного устройства в прямой видимости на передающее устройство.
2. Измерение точностных характеристик азимута отклонения угла прихода сигнала при использовании:
• амплитудной модуляции;
• фазовой манипуляции;
• квадратурной фазовой манипуляции.
Во время проведения эксперимента наблюдалось периодическое отклонение азимута угла в пределах от 35º до 40º для амплитудной модуляции и от 10º до 15º при генерации квадратурной фазовой манипуляции. Расстояние от приемного устройства до передающего устройства стационарного источника сигнала варьировалось от 1 до 20 м, при этом точностные характеристики азимута угла отклонения для бинарной фазовой манипуляции изменялись в пределах отклонений 5º.
Результаты экспериментальных исследований показали, что применение бинарной фазовой манипуляции обеспечивает наиболее точностные характеристики для решения задачи ориентации подвижных объектов методом пеленгации на базе алгоритма MUSIC.
Дальнейшая реализация позволила перейти к проектированию схемы движения АТС на основе вышеизложенных результатов экспериментов.
Пример маршрута движения АТС на закрытом технологическом участке приводится на рисунке 3.
Контрольные точки для участков совершения маневра, а именно определение направления дальнейшего движения, дополнены радиочастотной меткой (RFID), по мере приближения к которой на расстоянии заданной дистанции АТС выполнит остановку, в автоматическом режиме перестроит приемный тракт на несущую частоту следующего радиомаяка (РМ) и продолжит движение с учетом пеленга на очередной контрольный пост РМ.
Порядок выполняемых действий АТС на участках совершения маневра представлен фрагментом на рисунке 4.
Завершением исследований стала аппаратно-программная реализация управления физической моделью АТС на основе лабораторного прототипа системы ориентации подвижных объектов методом пеленгации сигнала и аппаратным модулем автоматического управления положением рулевых колес АТС в зависимости от пеленгационного положения (рельефа). Внешний вид панели управления продемонстрирован на рисунке 5.
После обработки сигнала на лицевую панель выводится текущее положение ориентации относительно РМ, в случаях отклонения от траектории движения влево или вправо выполняется коррекция положением угла колес АТС до достижения значения азимута угла направления, равного 90º.
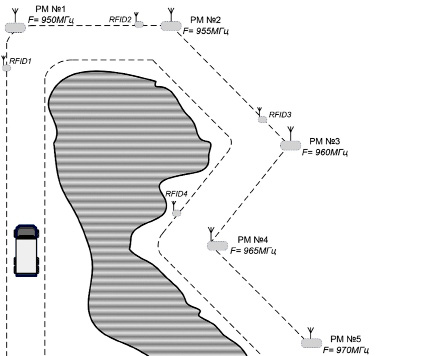
Рис. 3. Схема маршрута АТС на закрытом технологическом участке на основе пеленгации
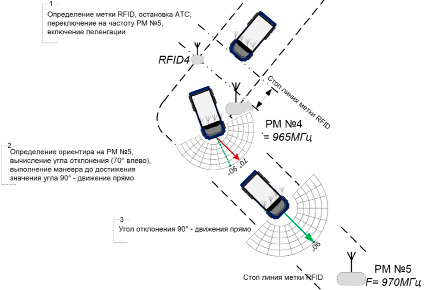
Рис. 4. Фрагмент выполнения маневра АТС (поворот влево): 1 – Определение метки RFID и переключение приемного тракта на несущую частоту радиомаяка РМ № 5; 2 – Вычисление азимута угла на источник радиосигнала и на его основе выполнение маневра АТС до получения азимута угла прямой видимости на источник сигнала (90º); 3 – Прямолинейное движение АТС в направлении радиометки

Рис. 5. Внешний вид программной панели управления движением АТС
Заключение
Предложенный способ, апробация которого была выполнена в лабораторных условиях, показал работоспособность предлагаемых решений, дальнейшая реализация и исследования которых позволят улучшить движение АТС по заданной траектории на закрытых технологических участках. В совокупности с алгоритмами машинного зрения радиопеленгация обеспечивает дополнительный функциональный сервис в маневренности АТС, особенно в условиях ограничения работы методов машинного зрения (в условиях потери зоны визуального контакта со световым маркером), а также способствует решению задачи удержания на траектории с минимальным подруливанием, тем самым позволяет более качественно выполнять движение АТС.
Библиографическая ссылка
Худоногов Д.Ю., Никитенко М.С., Кизилов С.А. ПРИМЕНЕНИЕ МЕТОДОВ ПЕЛЕНГАЦИИ В ЗАДАЧАХ ОРИЕНТАЦИИ АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ НА ЗАКРЫТОМ ТЕХНОЛОГИЧЕСКОМ УЧАСТКЕ // Современные наукоемкие технологии. – 2023. – № 12-2. – С. 239-245;URL: https://top-technologies.ru/ru/article/view?id=39888 (дата обращения: 20.05.2024).