



При создании современной сельскохозяйственной техники все большее применение находят системы автоматического управления движением и система параллельного вождения. Эти системы включают в себя электронную и гидравлическую компоненты для управления транспортным средством. Агрегат может работать в поле на автопилоте, но работа оператора в этом случае не исключается. Он помогает машине поворачивать и выравнивает курс при значительных отклонениях, во всем остальном нагрузка на человека снижается. Точное выполнение работ в поле позволяет снизить затраты времени и переработку на 10 %. При этом экономится горючее, минеральные удобрения расходуются разумнее. Также улучшается обрабатываемость полей гербицидами. Все известные системы автоматического пилотирования предполагают установку курсоуказателя, контроллера и приемника сигналов глобального спутникового позиционирования ГЛОНАС или GPS [6, 8, 2]. Известны решения, основанные на использовании для навигации систем машинного зрения [7, 4], а также комплексные сложные системы управления, включающие в себя технику разного назначения и управляющий комплекс [1]. И действительно, все эти устройства очевидны при работе с большими площадями обработки, где поля бескрайни и включают минимум препятствий. Однако известно, что точность позиционирования спутниковой навигации без наземной системы корректировки составляет 10–15 метров. Поэтому для сельскохозяйственной техники, работающей на небольших участках до 1 га, данный способ реализовать достаточно трудно. Особенно в условиях сельской местности, где территория строго разграничена между собственниками земли. Использование дифференциальной поправки с геостационарных спутников или с наземных базовых станций, как правило, является платным и не может рассматриваться для сельхозтехники малых размеров.
Предлагаемые решения
При разработке автономной системы управления сельскохозяйственным роботом необходимо определить концепцию позиционирования и навигации. Для чего требуется разработать основной перечень алгоритмов ручного и автоматического управления его движением. Робототехнический комплекс должен обладать следующими режимами вождения:
1. Дистанционное ручное управление оператором по радиоканалу. Такое управление должно уметь отдавать команды бортовому компьютеру на расстоянии до 500 м. Это такие команды, как: запуск и останов двигателя, выбор направления движения «вперед/назад», начало и останов движения, поворот колес влево/вправо. При этом оператор должен отслеживать все перемещения через видеокамеры, установленные на роботе.
2. Автоматическое управление позволяет оператору задавать на компьютере ориентиры для движения, а система должна просчитывать траекторию движения с учетом сложности рельефа местности. При обработке почвы также учесть следует и способы вспашки (загонная, фигурная и гладкая).
Система автоматического позиционирования сельскохозяйственного робота может иметь ряд решений. Простое и эффективное решение задачи может заключаться в отслеживании положения робота относительно четырех маячков с инфракрасными излучателями, предварительно установленными по углам трапецеидального участка. Каждый маячок генерирует оригинальный цифровой код. На корпус робота устанавливается инфракрасный приемник с точным поворотным механизмом и узким сектором обзора в горизонтальной плоскости.
В определенные ключевые моменты робот приостанавливается и координирует свое положение по маячкам. С учетом параметров движения и габаритных размеров робота информация от датчиков поступит на электронный микроконтроллер, и система определит текущее положение техники относительно маячков. Важно, чтобы относительное расположение (порядок обхода) маячков не было нарушено.
Рассмотрим работу данной системы на примере. Первое, что необходимо сделать роботу перед началом движения, это определить исходные размеры участка. Измерение участка можно произвести двумя способами:
1) произвести контрольные точные движения трактора с фиксированием изменений;
2) использовать несколько датчиков на тракторе с известным расстоянием между ними.
Первый способ имеет существенный недостаток, так как сложно точно рассчитать длину пройденного контрольного участка, это связано с неровностью и неоднородностью почвы, отличием сопротивляемости грунта, в том числе для разных колес. Но если использовать внутреннюю систему измерения расстояния, основанную, например, на акселерометре, то ошибку можно компенсировать. В связи с тем, что принцип измерений в обоих способах схож, рассмотрим сначала подробно первый способ, а потом особенности второго.
На рис. 1 схематично обозначено перемещение робота при определении параметров заданного участка. I1–I4 – инфракрасные маячки; A, B, C – расположение трактора; A2, B2, C2 – точки, расположенные вертикально ниже (на рисунке) оригинальных точек расположения робота, они служат исключительно для демонстрации расчетов.
Робот, используя инфракрасные сенсоры, при помощи сервомоторов (рис. 2) сканирует 360° пространства для поиска маячков. При нахождении маячка угол и номер найденного маячка сохраняется в памяти системы.
В точке А находим углы A2–A-I1, A2–A-I2, A2–A-I3, A2–A-I4, перемещаемся на заданное расстояние X в точку B, находим углы B2–B-I1, B2–B-I2, B2–B-I3, B2–B-I4, под прямым углом к отрезку A-B, перемещаемся в точку C, которая находится от B на расстоянии Y, находим углы C2–C-I1, C2–C-I2, C2–C-I3, C2–C-I4. Полученных параметров достаточно для определения положения всех четырех маячков относительно трактора на плоскости. Покажем это на примере. Найдем расстояния C-I4 и B-I4.
Имея расстояние BC и два угла B2BI4 и C2CI4 при этом C2BI4 = 180° – B2BI4, находим третий угол треугольника:
CI4B = 180° – C2CI4 – C2BI4. (1)
Теперь есть все, чтобы применить стандартное правило для решения треугольника:
 ; (2)
; (2)
 . (3)
. (3)
Аналогично могут быть определены все требующиеся для позиционирования расстояния и недостающие углы.
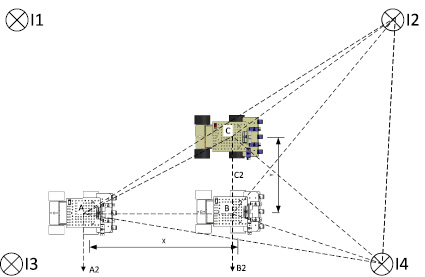
Рис. 1. Перемещение робота при определении параметров заданного участка
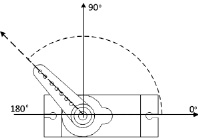
Рис. 2. Принцип работы сервомотора при нахождении угла к маячку
Второй способ проще и быстрее реализуется расстановкой датчиков по углам крыши трактора. При этом параметры крыши нам известны, осталось решить геометрическую задачу и запомнить параметры участка (расстояния между маячками и углы), расположение и направление робота. Достаточно двух датчиков, установленных на сервоприводах с максимальным углом поворота 360°, или четырех с максимальными углами поворота 180°. В этом случае устанавливаем датчики на максимально возможном расстоянии в пределах корпуса робота и учитываем расстояние между ними для дальнейших расчетов.
На рис. 3 изображен малый прототип робота. Данный прототип уже физически реализован и проходит испытания. На крыше робота установлены четыре приемника инфракрасного сигнала (попарно). Каждая пара приемников установлена на ось сервопривода с углами поворота 0–180°, приемники повернуты относительно друг друга на 180°. Сервоприводы ориентированы относительно центра робота и разнесены на строго заданное расстояние. Также робот содержит встроенный гироскоп и акселерометр, которые служат для промежуточных (между сканированием маячков) расчетов координат и направления робота. Размер данного прототипа 25×15 см.
Обобщенный алгоритм измерения углов между маячками и роботом приведен на рис. 4. Здесь используются четыре инфракрасных датчика с узким сектором обзора по горизонтали, хотя возможно использование другого типа датчиков, допустим радиопеленг, виды датчиков можно совмещать для исключения ошибки случайного отражения. Алгоритм предполагает движение сервопривода каждый раз на ~0,01°, но это экспериментальное значение, его можно изменить в пределах возможностей схемы управления, разрешения сервопривода и размера участка. Предполагается, что каждый маячок генерирует свой оригинальный код, который известен нашей программе. Неизвестные коды просто отбрасываются как недостоверные или помеха. Программа после запуска должна определить координаты робота относительно участка и выбрать порядок обхода, предполагая, что если некоторая правая/левая сторона пропущена, то ее обработка уже проведена до перезапуска программы.
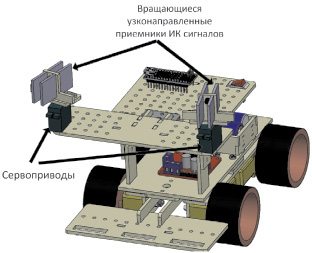
Рис. 3. Малый прототип сельскохозяйственного робота
Учитывая то, что сектор обзора датчика может быть недостаточно узким, следует применять дополнительный алгоритм нахождения середины. В качестве сервомотора необходимо использовать прибор с разрешающей способностью, которая позволяет точно позиционировать углы на исследуемом участке. Управление подобным прибором описывается в [5].
Алгоритм (рис. 4) предполагает точное позиционирование углов поворота сервомоторов с датчиками, что может вылиться в длительное ожидание окончания процесса, но за счет дополнительной оптимизации этот процесс можно значительно ускорить. Для робота, приведенного на рис. 3, возможно проведение практически одновременного сканирования пространства маячков всеми четырьмя приемниками. При этом алгоритм (рис. 4) несколько изменится, сервомоторы будут отрабатывать углы параллельно, а датчики условно параллельно обрабатывать информацию от маячков.
Упрощенный алгоритм движения робота по заданной траектории изображен на рис. 5. Предлагается помимо системы позиционирования на основе инфракрасных маячков применять электронный гироскоп и акселерометр. Это позволит вычислять точные координаты не постоянно, а лишь через определенные промежутки дистанции, в остальное время пользоваться электронным гироскопом для определения угла поворота и акселерометром для определения пройденного расстояния. Допускается возможность использования магнитометра. Предполагается использование недорогих приборов для неточной стабилизации движения. Подобные системы рассматриваются в [3].
На рис. 6, а изображена принципиальная схема малого прототипа инфракрасного маячка. Используются 6 инфракрасных светодиодов с углом светимости 20 градусов. Инфракрасные светодиоды через ключевой транзистор управляются контроллером. Контроллер, используя стандартный программный код, предназначенный для генерации управляющих инфракрасных сигналов, генерирует повторяющиеся последовательности, которые отличаются для каждого используемого маячка.
Получить представление о маячке можно из рис. 6, б. Это шест с закрепленными по окружности светодиодами. Исходя из того, что будут использоваться только светодиоды, находящиеся внутри четырехугольника поля, часть окружности не задействована.
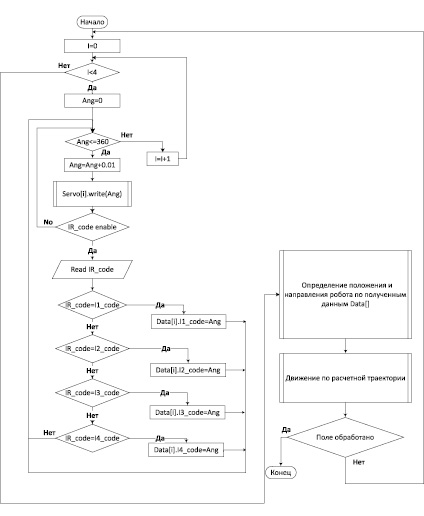
Рис. 4. Обобщенный алгоритм нахождения углов для маячков
Алгоритм работы маячка достаточно прост, он приведен на рис. 7, это постоянная генерация определенных сигналов через небольшие промежутки времени.
Выводы
В результате использования вышеуказанных решений была создана система автономного позиционирования робота, которая позволяет проводить полевые работы без использования GPS и сложных систем машинного зрения. Система робот – маячки имеет небольшую стоимость и показатели качества, достаточные для решения исследуемой проблемы. При интегрировании указанной системы в сложный комплекс можно получить максимально эффективную структуру с точки зрения стоимости и стоимости владения. В текущем году планируется проведение полевых испытаний робота, для этого готовится полноразмерный образец, который планируется оснастить двигателем внутреннего сгорания. Параллельно идет разработка полностью электрических полевых роботов, которые будут иметь меньшие размеры и применяться для обработки полей от вредителей, прополки, сбора урожая ягод и овощей. Разрабатываются электрические роботы, как на колесной базе, так и на основе ног.
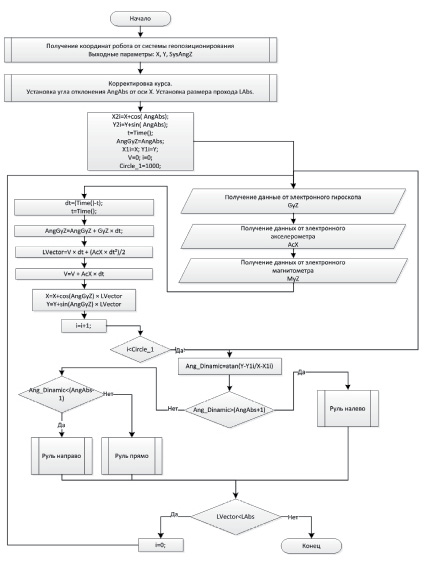
Рис. 5. Упрощенный алгоритм движения робота по заданной траектории
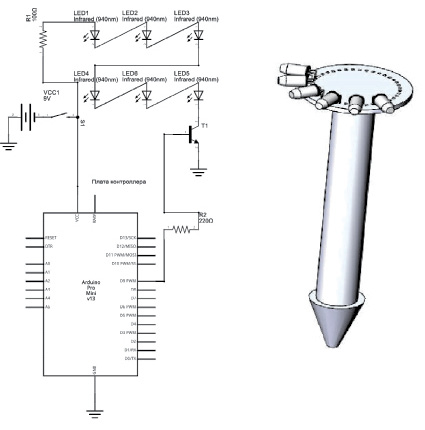
Рис. 6. Принципиальная схема инфракрасного маячка (а) и его прототип (б)
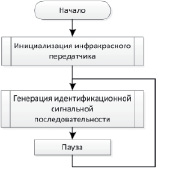
Рис. 7. Алгоритм работы маячка
Несмотря на успешные испытания прототипа некоторые виды полевых работ роботу пока не доступны по причине слабой проработки алгоритмов распознавания образов, которые ему потребуются как при сборе урожая, так и при проведении других работ, требующих сортировки, например прополке или сборе вредителей. Но работы в данной области уже ведутся.
Библиографическая ссылка
Момот М.В., Проскоков А.В., Натальченко А.С., Биктимиров А.С. АВТОМАТИЗАЦИЯ ОБРАБОТКИ ПОЧВЫ РОБОТОМ // Современные наукоемкие технологии. 2016. № 5-3. С. 468-475;URL: https://top-technologies.ru/ru/article/view?id=35935 (дата обращения: 05.06.2026).