



В современном машиностроении и приборостроении широко применяются приводные механизмы криволинейного перемещения камерного типа, принцип работы которых основан на изменении геометрии камеры при силовом воздействии на нее давления рабочей среды.
Одним из известных и распространенных механизмов криволинейного перемещения является «трубка Бурдона» [1, 2], принцип работы которой заключается в том, что повышение давления рабочей среды в полости изогнутой упругой трубки приводит к ее выпрямлению и реализации криволинейного перемещения.
В сильфонных пневмомеханических преобразователях [3] герметичная камера образована сильфоном и торцевыми крышками, а криволинейное перемещение достигается ее искривлением при повышении давления рабочей среды в камере. Данный процесс обеспечивается, например [4], использованием несимметричной упругой деформации гофр, которые изготавливаются неосесимметричными.
Реализация криволинейного перемещения в указанных приводах осуществляется только по одной радиальной траектории, задаваемой исходными упругими характеристиками применяемых камер, что ограничивает область их применения.
В вакуумных сильфонных рычажных шарнирных приводах [5], имеющих расширенную область применения, направление криволинейного перемещения задается в процессе их функционирования путем задания требуемого положения стержней.
Параметрические исследования [6] камерных приводов с изменяемым направлением криволинейного перемещения показали, что наиболее эффективным, по сравнению с диафрагменными и сильфонно-диафрагменными, является однорычажный сильфонный вакуумный привод.
Однако данный привод обладает недостатками, ограничивающими эффективность его работы:
– использование в качестве энергопитания давления разрежения ограничивает возможность повышения силовых характеристик привода;
– применение рычагов и шарнирных соединений оказывает негативное влияние на статические, а также динамические характеристики привода.
Цель исследования: повышение силовых характеристик приводов криволинейного перемещения путем разработки и исследования нового бесшарнирного и безрычажного пневмомеханического преобразователя.
Материалы и методы исследования
Объектом исследования является эффективность функционирования пневматических приводов. В качестве предмета исследования приняты сильфонные приводы криволинейного перемещения.
Для реализации поставленной цели проведем анализ возможности устранения указанных выше недостатков.
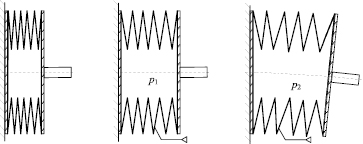
Рассмотрим работу сильфонного привода линейного перемещения (рис. 1), в котором в качестве энергопитания используется избыточное давление питания рабочей среды.
а) б) в)
Рис. 1. Схемы сильфонных приводных механизмов линейного перемещения: а), б), в) с давлением в рабочей камере соответственно атмосферным, p1, p2
В исходном положении (рис. 1, а) в рабочей камере атмосферное давление, сильфон сжат за счет упругости гофр и симметрично расположен относительно оси. Силовое воздействие давлением питания p1 (рис. 1, б) приводит к линейному перемещению сильфона. Однако дальнейшее повышение давления питания до величины p2 может привести к его искривлению. Это связано с влиянием несимметричности радиальных упругих характеристик гофр сильфона, геометрии камеры, а также воздействием внешних факторов. Указанный недостаток устраняют, например, путем установки направляющих, ограничивающих изменение заданного направления перемещения, что препятствует возможности возникновения криволинейного перемещения.
Предложена идея использования данного недостатка для реализации искривления сильфона путем снижения устойчивости его симметричного расположения, ограничивая линейное перемещение крышек сильфона по его центру.
Данная идея реализована в новом приводе криволинейного перемещения (рис. 2).

а) в)

б) г)
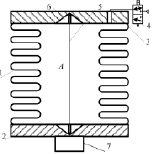
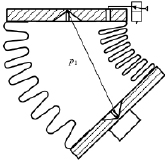
Рис. 2. Сильфонный безрычажный приводной механизм криволинейного перемещения: а), б) соответственно схемы устройства; в), г) общий вид
Устройство включает в себя поворотный механизм, состоящий из кольцевого сильфона, по оси которого на торцах закреплены две заглушки, образующие герметичную полость, выполненную с возможностью соединения со средством давления. В полости на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга.
С целью устранения отклонения криволинейного перемещения от заданного направления, в полости сильфона могут быть установлены радиальные направляющие, выполненные с возможностью взаимодействия с гибкой нерастяжимой тягой.
В приводе криволинейного перемещения (рис. 2, а) торцевые поверхности сильфона 1 закрыты заглушками 2 и 3, образуя герметичную полость А, выполненную с возможностью соединения через распределитель 4 с линией питания избыточного давления воздуха. В полости А на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга 5 и установлены радиальные направляющие 6, выполненные с возможностью взаимодействия с тягой. На заглушке 3 закреплен стержень 7 (подвижный рабочий орган привода).
Устройство работает следующим образом.
В исходном положении (рис. 2, а) полость А соединена через распределитель с атмосферой. Сильфон за счет упругости гофр занимает симметричное относительно оси положение. Заглушки расположены параллельно друг другу.
Поворотом заглушки 2 на угол относительно заглушки 3 задают направление криволинейного перемещения рабочего органа.
Для осуществления приводом требуемого криволинейного перемещения включают распределитель 4, соединяя полость А с линией питания воздухом (рис. 2, б). Силовое воздействие от избыточного давления p1 воздуха в полости А приводит к криволинейному перемещению заглушки 2 относительно заглушки 3. Чем больше величина давления в полости А, тем больше величина криволинейного перемещения.
Изменению направления траектории заданного криволинейного перемещения от влияния возможных боковых силовых воздействий противодействуют радиальные направляющие 6, с которыми взаимодействует тяга 5.
При выключении распределителя 4 полость А соединяется с атмосферой, уменьшается величина избыточного давления до нуля и устройство занимает исходное положение.
Таким образом, предлагаемое техническое решение повышает эффективность работы привода криволинейного перемещения путем увеличения силовых характеристик при сохранении его массогабаритных параметров, конструктивного упрощения, устранения возможности отклонения от заданной траектории.
Для подтверждения заявленной эффективности выполнены макетирование предлагаемого привода и параметрические натурные исследования.
Результаты исследования и их обсуждение
Характер силового усилия, создаваемого приводом на рабочий орган в зависимости от величины давления пневмопитания, показан на рис. 3.
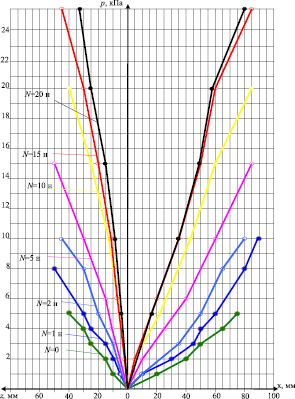
Рис. 3. Графики зависимости перемещения рабочего органа привода от величины давления в рабочей камере: Z, х – положение стержня соответственно по вертикальной и горизонтальной оси; p – пневмодавление в рабочей камере; N – полезная нагрузка
При макетировании и исследованиях применен такой же сильфон, который использовался ранее в вакуумном приводе криволинейного перемещения [6]. Материал камеры: резина ИРП-1266; толщина 1 мм; диаметр камеры 80 мм.
Графики показывают, что сильфонный безрычажный приводной механизм по сравнению с вакуумным, при тех же самых габаритных параметрах, обладает более высокими силовыми характеристиками.
Существенное увеличение силовых характеристик в предлагаемом приводе криволинейного перемещения достигается не только за счет повышения давления энергопитания. Отсутствие в приводе шарнирных соединений и рычагов приводит к тому, что даже при одинаковых величинах пневмодавления в рабочих камерах безрычажный является более эффективным (рис. 4).
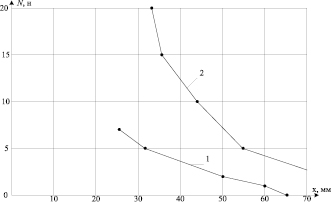
Рис. 4. Графики зависимости перемещения рабочего органа привода от величины полезной нагрузки при величине давления в рабочей камере p = 10 кПа: 1 и 2 – соответственно вакуумный и безрычажный приводы
Графики показывают, что силовая характеристика привода, например, для перемещения рабочего органа по оси х на 33 мм увеличена в четыре раза.
По интегральной оценке силовая характеристика привода повышена примерно в 3,8 раза при величине давления в рабочей камере 10 кПа.
Кроме этого, натурные исследования показали, что предложенный безрычажный привод более чувствителен к заданию направления движения, чем вакуумный привод криволинейного перемещения. Для задания направления криволинейного перемещения требуется отклонение рабочего органа от исходного положения соответственно на 5 и 15 градусов.
Заключение
Таким образом, анализом конструкций и методов работы камерных приводов, использующих для реализации криволинейного перемещения упругие свойства камер, выявлены недостатки, связанные с ограничениями повышения их технических характеристик. Применение вакуумного источника энергоносителя ограничивает область их применения. Предложены идея и новое устройство для ее реализации, в которых для реализации криволинейного перемещения в требуемом направлении используется избыточное давление питания рабочей среды.
Макетирование и проведение натурных исследований разработанного привода позволили установить, что он по техническим характеристикам качественно отличается от аналогичных, что позволит существенно повысить статические, динамические технические характеристики и расширить область применения приводов данного типа.
Библиографическая ссылка
Сысоев С.Н., Овчинников В.А., Голубева Т.Н. СИЛЬФОННЫЕ ПРИВОДЫ КРИВОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ // Современные наукоемкие технологии. – 2020. – № 4-2. – С. 251-255;URL: https://top-technologies.ru/ru/article/view?id=38005 (дата обращения: 19.04.2024).