



Вибрационные технологические процессы получили широкое распространение в производственных системах, относящихся к различным отраслям техники. Вибрация активно используется в процессах вибрационного переноса и технологиях обработки материалов, таких как вибрационное резание, виброгалтовка, вибрационное упрочнение, вибросепарация и др.
Во многих случаях вибрационное взаимодействие рассматривается как факт воздействия на состояние взаимодействующих сторон контакта соприкасающихся тел и возникающих при этом связей. В меньшей степени изучены особенности неудерживающих связей, которые характерны для технологических процессов виброупрочнения и вибрационного транспортирования.
Постановка задачи. Общие положения. Особенности реализации режимов вибрирующей поверхности с элементами рабочей среды. Рассматриваются подходы к построению математических моделей, отражающих особенности динамических взаимодействий, характерных для технологических процессов вибрационного упрочнения. Технологические эффекты достигаются в периодических виброударных контактах рабочей среды из мелких стальных шариков и вибрирующей рабочей поверхности обрабатываемой детали. Предложены некоторые фрагменты общей концепции математического моделирования технологического процесса вибрационного взаимодействия материальной частицей с вибрирующей поверхностью, на основе использования представлений о соударении без упругого отскока. Рассматривается вариант, когда рабочая среда представлена одной материальной частицей.
Методологический базис исследования включает в себя закономерности формирования траектории с непрерывным подбрасыванием, длительность которого кратна периоду вибрации контактирующей поверхности, характеристики и аналитические соотношения, определяющие условия отрыва и движения материальных частиц, особенности контактных взаимодействий и влияние ряда технологических факторов, связанных с учетом возникающих сил сопротивления со стороны рабочей среды [1÷9].
В качестве примера на рис. 1 приведены варианты графиков траекторий, для которых варьирование настроечных параметров приводит к нарушению возможности реализации режима с кратным подбрасыванием.
На основе использования функции зазора [2] получены аналитические зависимости амплитуды реализации кратного режима от параметров. С учетом влияния сил вязкого трения предложена и разработана методика исследования возможности реализации режимов кратного подбрасывания [3]. В частности, установлено, что силы вязкого трения могут выступать фактором регуляризации режима непрерывного подбрасывания.
Особенности оценки условий динамического контакта для составного твердого тела с учетом неудерживающего характера связей. Особый интерес представляет развитие обобщенных представлений о контактных взаимодействиях, которые не сопровождаются нарушением контакта. В качестве контактирующих элементов рассматриваются твердые тела конечных размеров, для которых смещение допускается только вдоль нормали к контактной поверхности.
Для ряда модельных задач разработана методика оценки условий сохранения динамического контакта. На рис. 2 показана математическая модель, в которой условие нарушение контакта определяется параметрами массоинерционных и упругих связей. Для реализации метода оценки условий сохранения контакта вводится понятие о полной и динамической реакциях. Критерием сохранение контакта выступает положительность полной контактной реакции. Критическим состоянием считается состояние, когда полная контактная реакция равна нулю.
В основе метода определения условий движения без нарушения контакта лежит построение амплитудно-частотной характеристики передаточной функции с входного воздействия на динамическую компоненту контактной реакции. Сравнение амплитуды колебания динамической реакции со статической реакцией для различных параметров механической системы формирует аналитический инструментарий для исследования условий беззазорных колебаний.
В зависимости от параметров системы условие контактного движения принимает вид:
 (1)
(1)
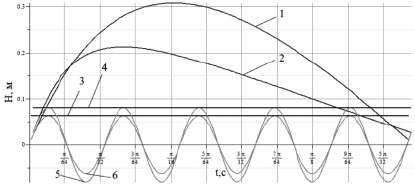
Рис. 1. Графики подлетов для кратных режимов подбрасывания с разными коэффициентами р1 = 6 кг/с, р2 = 18 кг/с, m = 1 кг, ω = 60 рад/с, А1 = 0,06 м, А2 = 0,08 м
Неравенство (1) может быть представлено в виде множества параметров системы в виде амплитудно-частотной области контакта. На рис. 3 представлено множество I амплитуд и частот, обеспечивающих только контактное колебание составного твердого тела на промежутке установившегося движения.
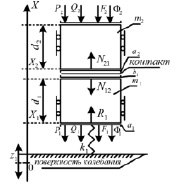
Рис. 2. Составное твердое тело на упругом колеблющемся основании Z1. Pi – силы вязкого трения, Qi – силы тяжести, Fi – постоянные силы, N12, N21 полные контактные реакции, a2, b1 – контактные поверхности
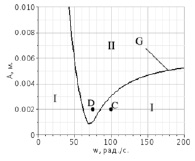
Рис. 3. Амплитудно-частотная область контакта. I – область контакта, II – область возможного зазора, G – линия уровня  для функции A1·A(ω1), С – контакт, D – возможный отрыв
для функции A1·A(ω1), С – контакт, D – возможный отрыв
Сформированное неравенство (1) определяет разбиение амплитудно-частотной области на подобласти различных режимов колебания составного твердого тела в зависимости от дополнительной постоянной силы, являющейся фактором контактного движения с учетом массы элементов.
Предлагаемая методика обобщается на многомерные модельные задачи. На рис 4 представлена механическая система с несколькими составными частями, зажатыми между поверхностями посредством упругих элементов. Контакт между частями носит неудерживающий характер.
Предлагаемая модель рассматривается как переходная к модели слоя материальных частиц.
Некоторые приложения. Возможности контроля вибрационного поля. Вибрационное поле реального технологического процесса или машины формируется в результате взаимного влияния разнородных факторов. Длительная работа технологической машины может привести к отклонению характеристик от допустимых значений. На основе проведения теоретических и экспериментальных исследований [8, 9] для контроля характеристик вибрационного поля разработана, апробирована и запатентована конструкция датчика (рис. 5) определения граничных параметров взаимодействия тел в вибрационных системах [10].
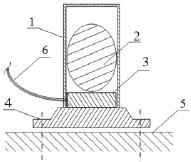
Рис. 5. Датчик определения граничных параметров взаимодействия тел в вибрационных системах: поверхность вибростола(5), цилиндрический корпус (1); инерционные элементы рабочей среды (2); пьезоэлектрический элемент (3); крепежный элемент (4); токовыводы (6)
Техническая применимость и реализация датчика обоснована теоретическими результатами и модельным экспериментом. На основе опытного образца получены и обработаны графики форм сигналов для соответствующих режимов движения опорной поверхности экспериментальной установки.
Разработанный методологический базис исследования контактного взаимодействия с учетом неудерживающих связей был применен к рассмотрению комплекса вопросов связанных с обоснованием выбора параметров работы вибрационного стенда, на котором реализуется процесс виброупрочнения лопасти вертолета [8].
Заключение
Проведенное исследование позволяет сделать ряд предварительных выводов.
1. Предлагается обобщенный подход к исследованию сложного контактного взаимодействия в механической колебательной системе, содержащей составные твердые тела, находящиеся под внешним кинематическим и силовым воздействием. Основой подхода служит метод функция зазора и условия, детализирующие отрыв материальной частицы от рабочей поверхности колебания.
2. Новизна предлагаемого подхода заключается в постановке задачи на определение условий сохранения сложного контакта между фрагментами составных твердых тел, входящих в состав механической системы на промежутке установившегося движения, в предположении неудерживающего характера связей.
3. Предлагаемый метод исследования динамического контактного взаимодействия расширяется на системы с несколькими степенями свободы.
4. Выявленные особенности и характер зависимости контактного взаимодействия позволяют регулировать условия реализации контакта для требуемого частотного диапазона. В качестве безразмерных параметров регулирования могут выступать обобщенные параметры системы.
5. Разработанный датчик точечного контроля параметров вибрационного поля выступает как элемент технологии регулирования технологического процесса в задачах увеличения эффективности работы вибрационных технологических машин.