



Интерес к «летающим платформам» нельзя назвать случайным. Они с не меньшим успехом, чем вертолёты, могут выполнять задачи связи, разведки, целеуказания, спасательных работ, перевозки людей, грузов и т.п., обладая при этом рядом существенных преимуществ:
• Относительная простота конструкции и дешевизна производства;
• Малые габариты и защищённые винты, вследствие чего очень мала вероятность их повреждения при взлёте-посадке на ограниченные площадки, полётах над застроенными территориями на малых высотах, а также между верхушками деревьев;
• Удобство в обслуживании и транспортировке (удобство загрузки и выгрузки) и, что особенно важно, возможность десантирования аппаратов с борта военно-транспортного самолёта и вертолёта;
• Значительно больший, чем у вертолёта, ресурс агрегатов.
В современных условиях к задачам военного применения «летающих платформ» добавляются новые, в том числе такие, как: ликвидация последствий аварий на взрыво- и пожароопасных объектах, газо- и нефтепроводах, химически опасных объектах, зонах разрушения плотин гидроузлов, а также задачи ликвидации последствий землетрясений, цунами, наводнений, лесных пожаров, ураганов, тайфунов и т.п.
Экскурс в историю создания
Исследования в области «летающих платформ» проводились особенно усиленно в США, где четыре фирмы – «Хиллер», «Пясецкий», «Крайслер» и «Аэрофизик» занимались разработкой и постройкой лёгких «летающих платформ» специального назначения (полётным весом не более 900 … 1000 кг), получивших название «летающие джипы».
Как указывали фирмы, по стоимости изготовления, простоте управления и эксплуатации «летающие платформы» вполне могут конкурировать с обыкновенными автомобилями, а по тактическим возможностям значительно превосходят их. При этом нужно иметь в виду, что вследствие большой энерговооружённости и, следовательно, повышенного расхода топлива экономичными эти аппараты могут оказаться только при полёте на малые расстояния.
В 1958–1961 гг. в Московском Авиационном Институте (МАИ) проводилась НИР по изучению «летающих платформ». Были разработаны экспериментальные летающие стенды, сами аппараты, силовые установки, системы управления. Некоторые проекты аппаратов были детально проработаны, изготовлены демонстрационные и продувочные модели для аэродинамических исследований. К концу 60-х годов интерес к аппаратам подобного типа постепенно угас.
Возрождение идеи
Однако в 2003 году стало известно о работах фирмы США «Ди-Стар Инжиниринг», специализирующейся на разработках вентиляторных двигателей и силовых установок для БЛА. Фирма проводит активные исследования в области подъёмных вентиляторов, считая, что внедрение перспективных технологий позволит создать силовые установки для использования на различных вертикально взлетающих летательных аппаратах, включая «летающие автомобили».
Руководитель фирмы сообщил о создании газогенератора D-STEC (D-star Turbine Engine Core), с помощью которого появляется возможность разработки подъёмного вентилятора с отношением взлётной тяги к массе 50:1. Кроме разработки вентиляторных установок, фирма разработала несколько вариантов вертикально взлетающих аппаратов («летающих автомобилей») «Д-Скутер» с подъёмно-маршевыми вентиляторами в кольцевых каналах, которые могут использоваться силами специального назначения. Один из таких аппаратов имеет длину 4,2 м и силовую установку, состоящую из трёх вентиляторных двигателей типа D-STEC (один подъёмный в передней части и два подъёмно-маршевых – в хвостовой). Такой аппарат предлагается в качестве санитарного, он рассчитан на перевозку трёх раненых или грузов массой до 270 кг. Аппарат «Д-Скутер» может транспортироваться на самолёте Локхид С-130 (в каждом самолёте размещается три аппарата) и сбрасываться в полёте. (По материалам издания Jane’s Defence Weekly, 16/VII 2003, № 2, V. 40, P.10.)
Один из вариантов в России
Разработанная в научно-техническом обществе «Ювенал» города Таганрога схема подобного аппарата содержит: аэродинамическое крыло малого удлинения, внутри которого размещена неподвижно пара подъёмно-маршевых вентиляторов в кольцевых каналах, а на его верхней панели – кабина экипажа и П-образное оперение, за которым установлена вторая пара управляемых поворотных подъёмно-маршевых вентиляторов в кольцах. Все четыре подъёмно-маршевых вентилятора приводятся во вращение электроприводами, обеспечиваемыми электроэнергией от двух газотурбогенераторов.
Продольное управление аппаратом осуществляется путём дифференциального изменения тяги пары передних и пары задних вентиляторов, поперечное – путём дифференциального изменения силы тяги боковых вентиляторов, расположенных справа и слева, а путевое – дифференциальным изменением силы и направления тяги задних вентиляторов одновременно с отклонением рулей направления.
Система управления аппаратом позволяет управлять им как командными органами управления пилотом с рабочего места экипажа на простых траекториях полёта, так и в автоматическом режиме полёта сигналами бортовой системы автоматического управления во всех остальных конфигурациях полёта, в том числе в процессе взлёта, набора высоты, при заходе на посадку и при выполнении самой посадки.
При этом управление аппаратом обеспечивается путём реализации алгоритмов универсальных базовых синергетических законов взаимосвязного управления его пространственным движением с учётом компоновочной схемы данного аппарата.
Синергетические законы изменения режимов работы силовых установок обеспечивают в присутствии внешних возмущающих факторов координирующее управление векторами тяг с учётом естественных свойств летательного аппарата как нелинейного объекта механической природы.
При таком подходе к построению системы управления в регуляторе формируется вектор управляющих воздействий с учётом всех переменных состояния системы, т. е. разбиения на отдельные контуры управления и построения изолированных следящих систем для каждого канала не производится. Это позволяет учесть динамические свойства математической модели летательного аппарата при аналитическом конструировании законов управления, что обеспечивает наибольшую адекватность системы управления физическому объекту (легкому летательному аппарату вертикального взлёта и посадки).
В бортовой системе автоматического управления аппаратом такого типа, кроме реализации синергетических алгоритмов управления пространственным движением, решается, в том числе задача оптимального распределения энергии между бортовыми источниками питания и силовыми установками.
Фото летающей модели такого аппарата с условным названием «Аэроджип-02» и его примерные расчетно-массовые характеристики приведены ниже.
Примерные расчетно-массовые характеристики аппарата «Аэроджип»
|
Взлётная масса аппарата Масса экипажа 1 чел. Масса пассажиров 3 чел. Масса конструкции Масса силовой установки на основе двух турбогенераторов Масса топлива Масса оборудования и управления |
1200 кг 100 кг 280 кг 370 кг 200 кг 170 кг 80 кг |

Рис. 1. Летающая модель «Аэроджип-02»
Система управления «Аэроджипом»
Система управления микропроцессорная на основе синергетических регуляторов. Пространственное положение аппарата задается и обеспечивается посредством дифференциального изменения тяги подъемно-маршевых силовых агрегатов в соответствии с законами управления, обеспечивающими соизмеримость генерируемой и потребляемой мощностей.
|
Крейсерская скорость Высота полёта Дальность полёта |
130 км/ч > 500 м 200 км |
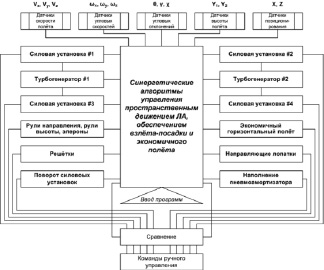
Рис. 2. Блок-схема системы управления «Аэроджипом».(См. патент РФ №2348568 от 29.06.2007, МПК8 В64С 15/00, В64С 15/12, авторы Воронков Ю.С., Воронков О.Ю.)
Описание системы управления
Структурная схема системы управления предлагаемым аппаратом «Аэроджип» представлена ниже.
Из приведённой схемы системы управления видно, что она включает в себя три органа управления: педали – для путевого управления аппаратом, ручку «тангаж-крен» – для продольного и поперечного управления, ручку «шаг-газ» – для управления мощностью двигателей и шагом винтов.
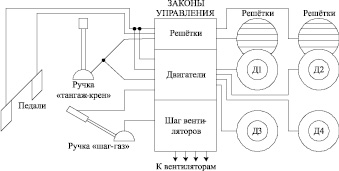
Рис. 3. Структурная схема системы управления предлагаемым аппаратом «Аэроджип»
Как уже было сказано выше, аппарат управляется главным образом за счёт дифференциального изменения силы тяги двигателей. Органы управления влияют на изменение режимов работы движителей следующим образом.
При продольных манипуляциях ручкой «тангаж-крен» происходит дифференциальное изменение оборотов передних и задних двигателей и отклонение решёток на передних вентиляторах, а, следовательно, изменение угла тангажа.
При поперечных манипуляциях ручкой «тангаж-крен» происходит дифференциальное изменение оборотов правых и левых двигателей, а, следовательно, изменение угла крена.
При манипуляциях педалями происходит дифференциальное изменение оборотов правого и левого передних двигателей и отклонение решёток на их вентиляторах, а, следовательно, путевое управление аппаратом.
При манипуляциях вперёд-назад ручкой «шаг-газ» происходит изменение шага вентиляторов на всех двигателях.
При манипуляциях рукоятью вокруг оси ручки «шаг-газ» происходит изменение оборотов всех двигателей аппарата, а, следовательно, изменение силы их тяги.
Блок-схема системы управления «Аэроджипом» показана на рис. 4.

Рис. 4. Блок-схема системы управления «Аэроджипом»
Приведённая схема означает следующее.
Исходя из требуемого режима функционирования летательного аппарата, задаются параметры общей модели аппарата, находящейся в верхнем блоке. В этой модели генерируются управляющие воздействия общего вида, которые далее поступают на силовые установки и управляющие решётки, где анализируются и преобразуются в параметры моделей этих элементов. На базе вышеназванных элементов формируются управляющие воздействия на уже конкретные органы управления. Для реализации подобной структуры необходимы математические модели как всего аппарата в целом, так и отдельных его исполнительных органов.
Чтобы исследовать динамику полёта «Аэроджипа», нужно составить как можно более полную его математическую модель. В эту модель должны входить выражения для всех сил и моментов, действующих на аппарат в полёте. За основу берется известная модель движения летательного аппарата как твёрдого тела в связанной с аппаратом системе координат (x, y, z).Далее в этой модели, представленной изначально в общей форме, будут проанализированы составляющие равнодействующих сил и моментов применительно к конкретному типу летательного аппарата, т.е. «Аэроджипу». Набор сил и моментов, действующие на вертикально взлетающий аппарат данной схемы, существенно отличается от такового для обычного, использующего разбег, самолёта, потому что для создания вертикальной подъемной силы используется сила тяги двигателей. Кроме всего прочего, возможен режим полёта с нулевой горизонтальной скоростью, то есть режим висения, неосуществимый для обычного аппарата горизонтального взлёта и посадки. В этом режиме подъёмная сила у «Аэроджипа» создаётся только силой тяги двигателей посредством вентиляторов.
Обозначения
Обозначения физических величин, фигурирующих в расчёте, сведены в таблицу.
|
СИЛЫ |
||
|
mg |
вес аппарата |
|
|
Fвx.i = (X вx.i, Y вx.i, Z вx.i) |
входной импульс i-го двигателя (отрицательная тяга) |
|
|
Fдв.i |
выходной импульс i-го двигателя (полная тяга) |
|
|
Xаэро, Yаэро, Zаэро |
аэродинамические силы |
|
|
МОМЕНТЫ |
||
|
Lаэро, Mаэро, Nаэро |
аэродинамические моменты |
|
|
Lдв.i, Mдв.i, Nдв.i |
моменты, создаваемые тягой i-го двигателя |
|
|
Lупр, Mупр, Nупр |
управляющие моменты |
|
|
Iрот.i, wрот.i |
кинетический момент ротора i-го двигателя |
|
|
УГЛЫ |
||
|
si |
угол между вектором тяги i-го двигателя и хордой крыла |
|
|
J |
угол тангажа |
|
|
c |
угол рысканья |
|
|
g |
угол крена |
|
|
СКОРОСТИ |
||
|
Vx, Vy, Vz |
составляющие вектора линейной скорости |
|
|
wx, wy, wz |
составляющие вектора угловой скорости |
|
Силы и моменты, действующие на «Аэроджип»
Набор сил и моментов, оказывающих своё влияние на динамику полёта аппарата, представлен далее (в связанной системе координат).
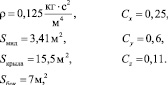
Расчёт аэродинамических сил
Аэродинамические силы, действующие на аппарат при движении со скоростью отличной от нуля, вычисляются по следующим формулам.
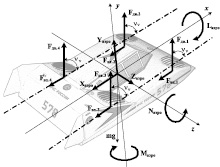
Рис. 4. Силы и моменты, действующие на «Аэроджип» в полёте
1. Сила лобового сопротивления

2. Подъёмная сила крыла

3. Боковая сила

В этих выражениях n – скорость движения аппарата.
Расчёт моментов
Для расчёта управляющих воздействий, которыми являются силы тяги вентиляторов, нужно выяснить, как эти силы отражаются на моментах относительно координатных осей (x, y, z). Прежде всего, требуется найти плечи рычагов, к концам которых приложены силы тяги двигателей. Геометрические размеры, необходимые для этого, показаны на рисунке ниже.
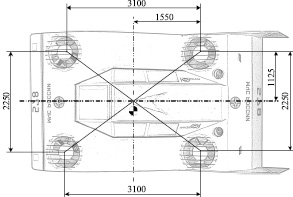
Рис. 5. К расчету моментов
Как видно из рисунка, плечо момента относительно оси x (поперечное управление) составляет lx = 1,125 м, а плечо момента относительно оси z (продольное управление) равно lz = 1,55 м. Плечо момента относительно оси y рассчитывается на основе величины lx и требует знания моментов роторов двигателей.
Теперь допустимо вычислить моменты, создаваемые тягой двигателей, по каждой из осей координат.
Момент относительно продольной оси (поперечное управление):

Момент относительно вертикальной оси (путевое управление):

Момент относительно поперечной оси (продольное управление):

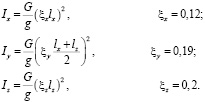
Далее, поскольку суммарный момент по каждой оси координат равен моменту инерции по этой оси, умноженному на угловую скорость относительно этой же оси, требуется найти моменты инерции. В первом приближении они рассчитываются по формулам:
Вывод математической модели «Аэроджипа»
Как уже было сказано выше, для формирования общей модели «Аэроджипа» за основу берётся обобщённая математическая модель летательного аппарата как твёрдого тела:
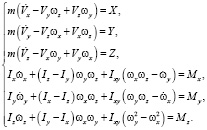
В этой модели силы и моменты, действующие на летательный аппарат в полёте, представлены равнодействующими. Чтобы можно было выполнить поставленную задачу, то есть синтезировать систему управления аппаратом, нужно разложить эти равнодействующие на составляющие:
Поскольку главной задачей управления летательным аппаратом любого типа является позиционирование его в пространстве, в систему дифференциальных уравнений нужно ввести уравнения для координат центра масс и углов тангажа, рысканья и крена.
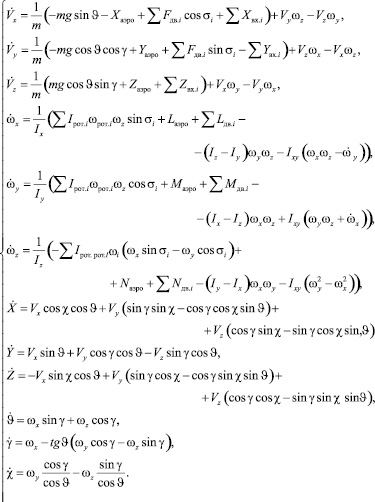
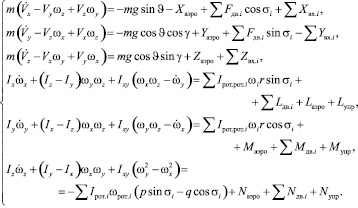
После подстановки выражений для всех сил и моментов в математическую модель движения аппарата, последняя принимает вид:

Таким образом, составлена полная нелинейная математическая модель «Аэроджипа», на основе анализа которой вырабатываются управляющие воздействия общего вида, поступающие на подсистемы управления исполнительными механизмами летательного аппарата.
Рис. 6. Так могло бы выглядеть наше творение в полёте…