



Физический износ коммуникаций, дымовых труб и кровли производственных корпусов промышленных предприятий требует систематического обследования и наблюдения для выяснения необходимости, своевременности проведения ремонтных работ. Подъем человека для обследования этих объектов связан с риском для его жизни, требует специального дорогостоящего оборудования, снаряжения и средств.
Так, обычное обследование дымовых труб ОАО «ТАГМЕТ» (г. Таганрог) обошлось в 30 000 долларов США и заняло несколько дней с риском для жизни специалистов, занимающихся этой работой.
Пилотируемый или беспилотный летательный аппарат вертикального взлета и посадки с возможностью зависания, оснащенный специальными приборами, оборудованием и средствами, мог бы решить задачу обследования этих объектов за несколько часов при отсутствии риска для жизни людей с минимальными затратами на данную операцию финансовых средств.
Описание используемого аэродинамического эффекта
Данное техническое решение относится к авиационной технике и касается летательных аппаратов вертикального взлета и посадки, снабженных кольцевым крылом и соосными вентиляторами. Снижение потерь на интерференцию соосных вентиляторов с закрепленными лопаточными колесами реализуется посредством применения раздвижных крыльев, в каждом из которых закреплен вентилятор с возможностью осевого перемещения одного из крыльев вдоль оси, что приводит к изменению расстояния между вентиляторами и уменьшению таким образом потерь.
При работе двух или большего числа несущих винтов, расположенных очень близко друг к другу, равно как и лопаточных колес соосного вентилятора, поле скоростей каждого из них изменяется; аэродинамические характеристики такой несущей системы не равны сумме характеристик отдельных винтов или лопаточных колес. Предельным случаем является соосная система, у которой площадь несущей поверхности точно равна половине площади отдельных винтов и, значит, нагрузка на диск винта вдвое больше. Несущие винты с перекрытием при малом расстоянии по вертикали (менее 0,1R) имеют общую скорость протекания воздушного потока через перекрывающиеся части дисков. При этом для винтов с одинаковой силой тяги нагрузки перекрывающихся частей оказываются больше, чем у отдельного винта, а значит, больше и местные затраты индуктивной мощности. С уменьшением расстояния по вертикали между дисками винтов увеличение потребной мощности достигает величины 41 %. Когда расстояние по вертикали между соосными винтами возрастает, след верхнего винта вследствие поджатия оказывает влияние на все меньшую часть диска нижнего винта. При этом вследствие интерференции потребная индуктивная мощность возрастает только на 28 %, а в целом потери на интерференцию снижаются.
Конструкция аппарата
Техническое решение, основанное на описанном эффекте, поясняется необходимыми чертежами.
На рис. 1 изображен летательный аппарат, вид сбоку; на рис. 2 – летательный аппарат, вид сверху; на рис. 3 – узел I из рис. 1.
Летательный аппарат содержит основное кольцевое крыло 1, дополнительное кольцевое крыло 2 и концентрично расположенную кабину экипажа 3, размещенную в центре крыла 1, прикрепленную к нему пилонами 4. В кольцевом канале, образованном крылом и кабиной, размещен вентилятор, выполненный в виде соосных лопаточных колес 5 и 6 противоположного вращения. Верхнее лопаточное колесо 5 вентилятора смонтировано под кабиной экипажа 3, а нижнее лопаточное колесо 6 смонтировано на дополнительном крыле 2 посредством пилонов 7 и соединено с силовой установкой 8 телескопическим валом. Силовая установка 8 с приводом противоположного вращения и телескопического перемещения приводного вала крепится к узлам концентрично расположенной кабины экипажа 3. Вращающий момент от вала силовой установки 8 передается непосредственно на лопаточное колесо 5, а телескопически выдвигаемой частью приводного вала на лопаточное колесо 6. Летательный аппарат снабжен шасси 9, прикрепленным к крылу 1. Амортизационные стойки шасси 9 являются направляющими для перемещения кольцевого крыла 2 в вертикальном направлении с помощью силового привода.
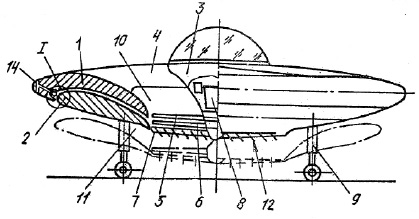
Рис. 1
Дополнительное кольцевое крыло 2 имеет двояковыпуклый профиль, причем его верхняя поверхность, прилегающая к нижней поверхности основного крыла 1, спроектирована эквидистантно нижней поверхности основного крыла 1. При удалении дополнительного кольцевого крыла 2 от основного кольцевого крыла 1 образуется кольцевой профилированный канал 11.
Пропульсивная сила создается за счет отклонения управляющих лопаток 12, установленных на выходе из вентилятора 5, 6. При дифференциальном отклонении управляющих лопаток 12 создаются управляющие моменты.
В нижней поверхности основного кольцевого крыла 1 имеется средство 13 для индуцирования тороидального воздушного вихря.
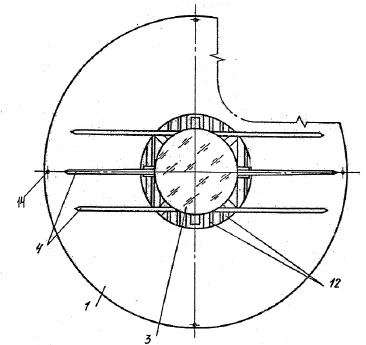
Рис. 2
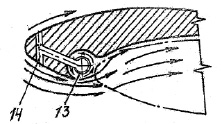
Рис. 3
Основное кольцевое крыло 1 имеет выпуклую верхнюю и вогнутую нижнюю поверхности. Средство 13 для индуцирования тороидального воздушного вихря представляют собой трубу, свернутую в кольцо, по которой подается сжатый воздух от компрессора. Труба расположена в профилированном кольцевом канале нижней вогнутой поверхности крыла 1 с постоянным зазором. Вокруг трубы образуется вихрь благодаря тангенциальной подаче сжатого воздуха из средства 13 по всей окружности кольцевого крыла 1. В свою очередь, всасываемый лопаточным колесом 5 и эжектируемый лопаточным колесом 6 поток воздуха отклоняется к нижней поверхности крыла 1 по плавной кривой за счет взаимодействия с тороидальным вихрем. Создается как бы продолжение профиля воздушным потоком. Это позволяет организовать течение основной массы воздуха с меньшей вероятностью отрыва пограничного слоя от вогнутой части кольцевого крыла 1 с наименьшими потерями.
В своем крайнем верхнем положении дополнительное крыло 2 прижато к нижней поверхности основного крыла 1, образуя при этом единое кольцевое крыло, на котором возникают аэродинамические силы. Данное взаиморасположение кольцевых крыльев 1, 2 характерно для горизонтального полета аппарата.
Новизна и отличия
Новизной и отличиями данного технического решения от других известных решений являются:
во-первых, наличие несущего корпуса, составленного из двух профилированных частей (основного кольцевого крыла 1 и дополнительного кольцевого крыла 2), способных благодаря своей форме и взаимному расположению создавать каждое в отдельности аэродинамическую подъемную силу;
во-вторых, профилированные кольцеобразные части несущего корпуса (основное крыло 1 и дополнительное крыло 2), способные создавать аэродинамическую подъемную силу, содержат каждое в отдельности лопаточное колесо 5 и лопаточное колесо 6 соосного вентилятора, создающего тягу;
в-третьих, лопаточные колеса 5 и 6, закрепленные в каждой из двух профилированных частей (в основном кольцевом крыле 1 и дополнительном кольцевом крыле 2), соединены с общим приводом противоположного вращения, имеют возможность перемещаться вдоль его оси с сохранением всех динамических и кинематических параметров.
в-четвертых, нижняя поверхность основного кольцевого крыла 1 оснащена средствами 13, индуцирующими тороидальный воздушный вихрь, который улучшает условия обтекания профиля кольцевого крыла 1 и предотвращает срывные явления на режимах взлета-посадки, полета на малой высоте и переходных режимах полета аппарата.
Работа аппарата
Вертикальный взлет летательного аппарата выполняется при раздвинутых в вертикальном направлении крыльях 1 и 2 (положение крыла 2 при этом показано пунктиром на (рис. 1), причем лопаточное колесо 6 вместе с дополнительным крылом 2 перемещено вниз.
При включении силовой установки 8 воздушный поток, создаваемый вентилятором 5, 6, отбрасывается вниз. В своем крайнем нижнем положении дополнительное кольцевое крыло 2 находится на удалении от основного кольцевого крыла 1. Лопаточное колесо 5, установленное в кольцевом крыле 1 на выходе из кольцевого канала 10, засасывает воздух, сжимает и ускоряет его в кольцевом канале, создавая скоростной поток, который эжектирует в кольцевую щель 11 дополнительные массы воздуха, придавая также им ускорение. Интенсивность суммарной подъемной силы аппарата возрастает на величину, пропорциональную увеличившейся при этом площади несущих поверхностей, находящихся в потоке воздушной среды. Данный эффект в соответствии с законом Бернулли вызывает на верхней и нижней поверхностях кольцевых крыльев 1 и 2 разницу давлений, что является дополнительной аэродинамической подъемной силой к тяге соосного вентилятора 5, 6.
Лопаточное колесо 6, установленное на выходе из кольцевого канала 11, в свою очередь также создает скоростной поток, который реализуется в тягу. Таким образом, воздушный поток от соосного вентилятора 5, 6 создает силу тяги, направленную вдоль его оси вращения, а каждое из кольцевых крыльев создает аэродинамическую подъемную силу, состоящую из нескольких составляющих.
При полете с малой скоростью и на взлетно-посадочных режимах дополнительное кольцевое крыло 2 находится в промежуточном или крайнем нижнем положении, при этом подъемная сила достигает максимальной величины.
Реактивный момент лопаточных колес 5, 6 уравновешен их взаимно противоположным вращением.
Особенности управления аппаратом
Назначение управляющих лопаток 12 не исчерпывается только созданием пропульсивной силы, они также служат для управления летательным аппаратом и для выравнивания потока, отбрасываемого лопаточными колесами 5, 6 вниз. Величина пропульсивной силы и её направление регулируется посредством изменения углов установки направляющих лопаток 12. Отклонение управляющих лопаток 12 на небольшой угол (до 5 град.) не вызывает значительной потери тяги силовой установки [1, 11].
Управляющие лопатки 12 представляют собой удобообтекаемые пластины, имеющие продольные оси вращения. Они кинематически связаны с командными органами управления. Весь набор управляющих лопаток 12 разбит на 2 группы: правую и левую.
Левая группа – управление величиной тяги и направлением пропульсивной силы – меняет направление потока воздушной струи, создаваемой силовой установкой аппарата относительно оси Y, слева. Правая группа – управление величиной тяги и направлением пропульсивной силы – меняет направление потока воздушной струи, создаваемой силовой установкой аппарата относительно оси Y, справа. Командным органом для левой и правой группы служат педали и ручка «шаг – газ». Поворот по курсу влево. Левая педаль с ходом «от себя» – правая педаль «на себя» и наоборот. Поворот по курсу вправо. Правая педаль с ходом «от себя» – левая педаль «на себя».
Управление по тангажу, вокруг оси Z, и крену, вокруг оси Х, осуществляется струйными рулями совместно с ручкой «шаг – газ».
При этом поток сжатого воздуха из переднего соплового аппарата струйного управления относительно оси Z вызывает увеличение угла тангажа. Поток сжатого воздуха из заднего соплового аппарата струйного управления относительно оси Z вызывает уменьшение угла тангажа. Командным органом управления по тангажу является ручка управления с ходом «вперед-назад».
Поток сжатого воздуха из соплового аппарата струйного управления с противоположной крену стороны относительно оси Х вызывает заданный крен. Командным органом управления креном является ручка управления с ходом «вправо-влево».
Струйные рули 14 представляют собой исполнительные органы, рабочим телом которых является сжатый воздух, отбираемый от компрессора силовой установки. От компрессора сжатый воздух по трубопроводам высокого давления направляется в кольцевое средство 13 для индуцирования тороидального воздушного вихря. Средство 13 оснащено управляемым тангенциально расположенным щелевым соплом, из которого выходящий с большой скоростью воздух закручивается в тороидальный вихрь вокруг средства 13 с целью обеспечения безотрывного обтекания основной массы воздуха в кольцевом канале 11. От магистрали средства 13 по трубам производится отбор сжатого воздуха для работы системы струйного управления 14. Во время срабатывания сопловых аппаратов струйного управления 14 на некотором участке средства 13 автоматически перекрывается подача воздуха в управляемое тангенциально расположенное щелевое сопло для подпитки торообразного вихря. Расход воздуха при этом сосредотачивается на обеспечении данного участка системы струйного управления 14. Подача сжатого воздуха в сопловые аппараты струйного управления 14 вызывает в соответствии с III Законом Ньютона возникновение управляющей реактивной силы, что на большом плече приводит к возникновению управляющего момента.
Изменение тяги силовой установки осуществляется командным рычагом «шаг – газ», который воздействует на угол установки лопаток лопаточного колеса 5, 6 и режим работы двигателя.
Особенности стабилизации аппарата
Один из вариантов летательного аппарата предполагает использование известного технического решения по осуществлению его стабилизации гироскопическим воздействием лопаточных колес 5, 6 на конструкцию. Это означает, что лопаточные колеса 5, 6 используются в качестве двухосных гиростабилизаторов. К ведущим валам лопаточные колеса 5, 6 крепятся шарнирно таким образом, что оси прецессии взаимно перпендикулярны. В обоих случаях приложение возмущающего момента к корпусу аппарата по одной из осей подвеса лопаточных колес вызывает прецессию лишь одного лопаточного колеса, так как на другое лопаточное колесо момент не передается либо из-за совпадения оси приложения момента и оси прецессии лопаточного колеса, либо из-за совпадения оси приложения момента с вектором кинематического момента лопаточного колеса. Прецессирующее лопаточное колесо компенсирует внешний момент сначала за счет гироскопического момента, а затем включает разгрузочный механизм (двигатель) по оси приложения внешнего момента. Таким образом, датчик каждого из лопаточных колес связан с разгрузочным механизмом (двигателем) одной из осей привода и управляющими лопатками 12. Кинематические моменты лопаточных колес направлены в противоположные стороны и при работе устройства колеблются около вертикали.
Выводы
Таким образом, предлагаемая конструкция летательного аппарата вертикального взлета и посадки с раздвижным кольцевым крылом имеет наибольшую эффективность при взлете, посадке, полете на малой высоте и экономичность в горизонтальном полете. Аппарат способен подходить на близкие расстояния к зданиям и сооружениям для наблюдения обстановки внутри зданий, а также для корректировки действий спецподразделений во время проведения контртеррористических операций и осуществления спасательных работ.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С РАЗДВИЖНЫМ КРЫЛОМ // Современные наукоемкие технологии. – 2014. – № 8. – С. 18-23;URL: https://top-technologies.ru/ru/article/view?id=34617 (дата обращения: 19.04.2024).