



Рассмотрим определение устойчивости нечёткой системы [1,2] в малом, в большом и в целом на примере системы управления «тиристорный преобразователь – двигатель», заменив обычный классический регулятор тока на нечёткий регулятор с алгоритмом вывода Мамдани (Сугено). Произведём имитационное моделирование данной системы при помощи языка инженерных вычислений Matlab, при этом будем изменять вид и количество функций принадлежности для лингвистических переменных на входе и выходе нечёткого регулятора.
Входы нечёткого регулятора [3] формализуются лингвистическими переменными input1 и input2 и содержат по пять (девять) термов треугольного вида в базовом терм-множестве [MM(--), M(-), Z(0), P(+), PP(++)] либо [MH(--), MB(--), MM(--), M(-), Z(0), P(+), PP(++), PB(++), PH(++)].
Выход нечёткого регулятора [3] с алгоритмом вывода Мамдани представлен на Рис.1 и формализуется лингвистической переменной output1 и содержит пять термов треугольного вида в базовом терм-множестве. 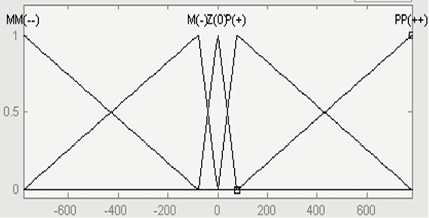
Рис.1. Распределение функций принадлежности нечёткого регулятора (выход input1)
Блок дефаззификации нечёткого регулятора [3] может быть представлен упрощенным алгоритмом нечеткого вывода (или алгоритмом Сугено нулевого порядка) с пятью (девятью) константами в выходной переменной output1 [MM(--), M(-), Z(0), P(+), PP(++)] либо [MH(--), MB(--), MM(--), M(-), Z(0), P(+), PP(++), PB(++), PH(++)].
База знаний нечёткого регулятора (для пяти констант) представляет собой нечеткие продукционные правила следующего вида:
1. Если (вход1 есть MM(--)) тогда (выход1 есть MM(--))
2. Если (вход1 есть M(-)) тогда (выход1 есть M(-))
3. Если (вход1 есть Z(0)) и (вход2 есть Z(0))тогда (выход1 есть Z(0))
4. Если (вход1 есть P(+)) тогда (выход1 есть P(+))
5. Если (вход1 есть PP(++)) тогда (выход1 есть PP(++))
Нечеткая система управления «тиристорный преобразователь – двигатель» имеет вид, представленный на Рис.2.
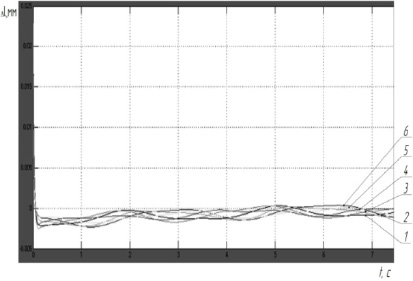
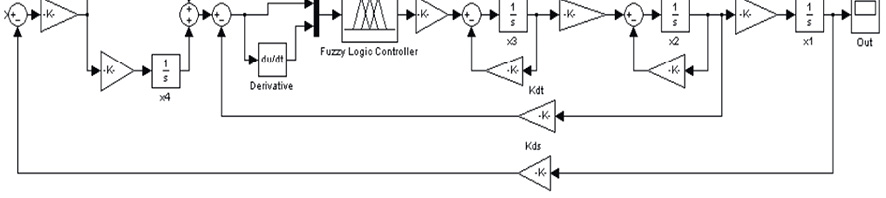
Рис.2. Структурная схема нечеткой системы управления
Система находится в свободном движении, зададим начальные условия и построим фазовую траекторию (Рис.3). 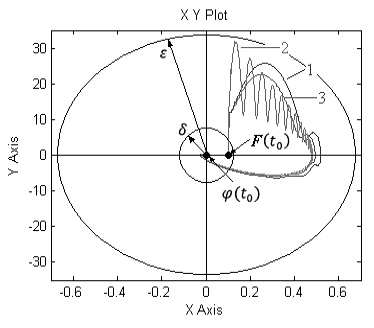
Рис.3. фазовые траектории системы:
1 – с классическим регулятором тока;
2 – с нечётким регулятором тока с алгоритмом вывода Мамдани;
3 – с нечётким регулятором тока с алгоритмом вывода Сугено.
В данном случае система имеет только одну особую точку в начале координат (устойчивый фокус). Как видно из рисунка и согласно определению, все точки фазовой траектории, начинающейся в δ-окрестности, принадлежат ε-окрестности. Кроме того, фазовая траектория, начинающаяся в δ-окрестности положения равновесия  =0, стремится к нему при t→∞, следовательно, данная система является асимптотически устойчивой в малом (по Ляпунову). Кроме того, в данном случае область притяжения особой точки не ограничена и охватывает всё фазовое пространство. Другими словами, система устойчива после любых начальных отклонений, следовательно, она устойчива в целом (Рис. 4).
=0, стремится к нему при t→∞, следовательно, данная система является асимптотически устойчивой в малом (по Ляпунову). Кроме того, в данном случае область притяжения особой точки не ограничена и охватывает всё фазовое пространство. Другими словами, система устойчива после любых начальных отклонений, следовательно, она устойчива в целом (Рис. 4).
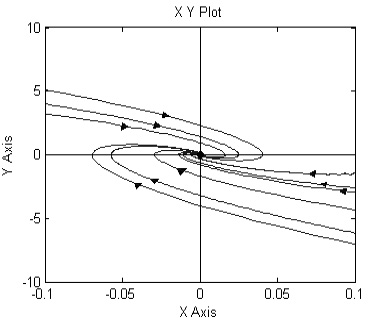
Рис.4. фазовый портрет системы с нечётким регулятором тока
с алгоритмом вывода Мамдани (вблизи устойчивого фокуса).
Необходимо отметить, что повышение степени информативности нечёткого регулятора и выбор оптимального вида и распределения функций принадлежности улучшают динамические качества и повышают запас устойчивости системы, о чем свидетельствует быстрое и плавное приближение фазовой траектории к положению равновесия.
Библиографическая ссылка
Манчук Д.А, Черный С.П. АНАЛИЗ УСТОЙЧИВОСТИ НЕЧЕТКИХ СИСТЕМ УПРАВЛЕНИЯ В МАЛОМ, В БОЛЬШОМ, В ЦЕЛОМ // Современные наукоемкие технологии. – 2014. – № 5-1. – С. 74-75;URL: https://top-technologies.ru/ru/article/view?id=33710 (дата обращения: 18.04.2024).