



В предлагаемом техническом решении десантируемый спасательный аппарат представляет собой компактно складываемую вдоль вертикального силового элемента конструкцию из эластичных оболочек, подкрепляемых надувным эластичным каркасом. В развернутом состоянии спасательный аппарат преобразуется в герметичный куполообразный корпус, верхняя оболочка которого соответствует поверхности Коанда. Верхняя и нижняя оболочки корпуса по его вертикальной оси замкнуты вертикальным силовым элементом в виде трубы. К нему в его верхней части прикреплен центробежный ускоритель. Соосно с ускорителем установлен управляемый складной воздушный винт противоположного вращения. Внутри вертикального силового элемента в его нижней части размещен двигатель с трансмиссией, передающей крутящий момент на ускоритель и управляемый воздушный винт.
Новизна решений. Новым в данном техническом решении является:
Наличие комбинации центробежного воздушного ускорителя с управляемым по тангажу и крену воздушным винтом.
Наличие центробежного воздушного ускорителя в комбинации с оболочкой, выполненной в виде поверхности Коанда, и управляемым воздушным винтом.
В походном положении управляемый воздушный винт выполнен складным вдоль вертикальной оси аппарата.
В рабочем состоянии двояковыпуклый эластичный корпус образован эластичным надувным каркасом, к которому крепятся эластичные оболочки и внутренние теплоизолирующие оболочки.
В походном положении оболочки эластичного корпуса могут складываться, занимая минимальный объем.
Оболочки двояковыпуклого эластичного корпуса соединены в центре с торцами вертикального силового элемента, внутри которого размещена силовая установка с трансмиссией.
Конструкция аппарата. Сущность технического решения поясняется чертежами, где на рис. 1 показан вид сбоку аппарата, на рис. 2 показан вид сверху, на рис. 3 аппарат в сложенном виде, уложенном в транспортировочный чехол, на рис. 4–7 показана последовательность десантирования аппарата, включая выброс из самолета (вертолета), снятие транспортировочного чехла, развертывание лопастей воздушного винта, управляемый спуск на режиме авторотации, развертывание (формообразование) мягкого корпуса и приводнение в районе бедствия.
Десантируемый спасательный аппарат со складным управляемым воздушным винтом и центробежным воздушным ускорителем содержит: (рис. 1, 2) двояковыпуклый куполообразный эластичный корпус 1, образованный верхней выпуклой оболочкой, выполненной в виде поверхности Коанда, с прикрепленной в её экваториальной части нижней выпуклой оболочкой. Формообразование верхней оболочки соответствует поверхности Коанда, обеспечено эластичным надувным каркасом 2, к которому крепятся эластичная оболочка 19 и внутренняя теплоизолирующая оболочка 20. Нижняя поверхность эластичного корпуса 1, формообразование которой задано эластичным надувным каркасом 3, также состоит из наружной оболочки 19 и внутренней теплоизолирующей оболочки 20, которые прикреплены к эластичному надувному каркасу 3.
Оболочки двояковыпуклого куполообразного эластичного корпуса 1 на определенной дистанции по высоте аппарата соединяются в центральной части с торцами вертикального силового элемента из композитов 4 посредством герметичных стыков 5 и 6, образуя некоторый объем.
Внутренний канал вертикального силового элемента 4 является воздуховодом двигателя 12 и одновременно вертикальным силовым элементом всего аппарата. В верхней части корпуса 1 на торце вертикального силового элемента 4 установлен воздушный ускоритель 7 соосно со складным воздушным винтом 8 противоположного вращения. Вал трансмиссии 9 воздушного винта 8 размещен внутри полого вала 10 трансмиссии воздушного ускорителя 7. Оба вала 9 и 10 соединены кинематически с редуктором 11, приводимым в действие двигателем 12, размещенным внутри вертикального силового элемента 4 в его нижней части. В качестве двигателя 12 может применяться газотурбинный двигатель со свободной турбиной. Топливо для питания двигателя 12 размещено в топливном отсеке 13, концентрично охватывающим нижнюю часть вертикального силового элемента 4.
На внешней поверхности вертикального силового элемента 4 закреплены блоки и оборудование систем автоматизированного управления и наведения 14 десантируемого аппарата.
Управляемый воздушный винт 8 противоположного вращения снабжен механизмом раскладки 22 лопастей, закрепленным на втулке 23 воздушного винта 8. Лопасти воздушного винта 8 прикреплены к втулке 23 посредством шарниров 24.
Втулка 23 воздушного винта 8 установлена шарнирно на валу 9 и имеет двухстепенной шарнир 33, который обеспечивает наклоны вперед – назад, соответствуя изменению углов по тангажу, и наклоны вправо – влево, обеспечивая необходимый крен аппарата. Горизонтальный шарнир воздушного винта 8 – общий на две лопасти и располагается под углом 45 градусов к оси лопастей. Такое устройство втулки 23 обеспечивает автоматическое управление общим шагом винта 8 и не требует отдельного командно-контрольного рычага управления. В целом, работа системы управления аппаратом обеспечена соответствием принципу независимости каналов управления.
Применение центробежного воздушного ускорителя 7 в комбинации с оболочкой, выполненной в виде поверхности Коанда и управляемым воздушным винтом 8, позволяет сократить размеры воздушного винта 8 и придать ему новые свойства.
Кинематически к втулке воздушного винта 8 прикреплена складная телескопическая ручка управления аппаратом 15. К внешней поверхности вертикального силового элемента 4 крепится также складное кресло пилота 16. Внутри эластичного корпуса 1 размещена силовая диафрагма 17, которая разделяет эластичный корпус 1 на две герметичные полости. В нижней части эластичного корпуса 1 размещен надувной торообразный амортизатор – баллонет 18.
Трубки каркаса 2, 3 эластичного корпуса 1 наполняются газом от баллонов 21, размещенных в нижней части эластичного корпуса 1.
На периферии аппарата в его нижней части закреплены силовые спасательные поручни 25.
В походном положении (рис. 3) аппарат уложен в транспортировочный чехол 26, в верхней части которого расположен контейнер 27 с парашютной системой 28. Парашютная система 28 включает в себя стабилизирующий парашют 30, первый тормозной парашют 31, второй тормозной парашют 32. Она имеет связь посредством шарнира 29 с втулкой 23 воздушного винта 8 и воспринимает нагрузку от веса аппарата при его торможении и спуске на парашютах. Воздушный винт 8 противоположного вращения, в свою очередь, благодаря своей шарнирной подвеске 33 имеет возможность наклоняться в двух плоскостях (по тангажу и крену), тем самым обеспечивая отклонение вектора тяги аппарата. Это и легло в основу управления аппаратом в пространстве. Аппарат снабжен плотно закрываемым люком 34, который после десантирования аппарата на воду может быть легко вскрыт снаружи одним из пострадавших. В дальнейшем люк 34 может быть надежно закрыт изнутри от попадания воды при выполнении необходимых маневров для сбора пострадавших. Разгерметизация лю-
ка 34 производится для подъема и приема пострадавших внутрь аппарата.
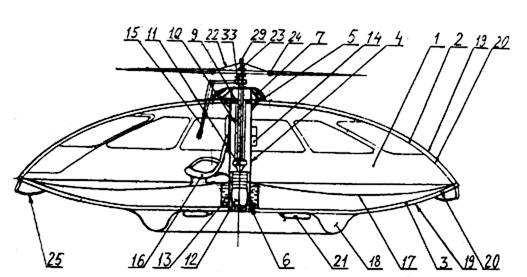
Рис. 1
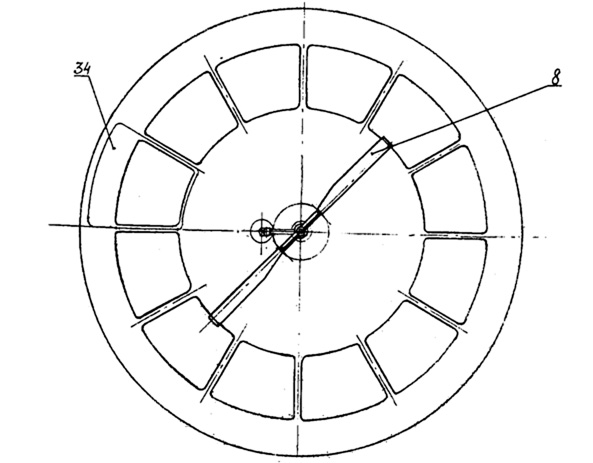
Рис. 2
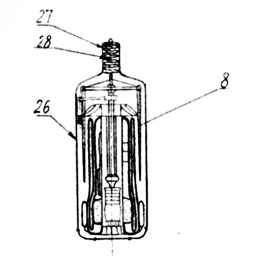
Рис. 3
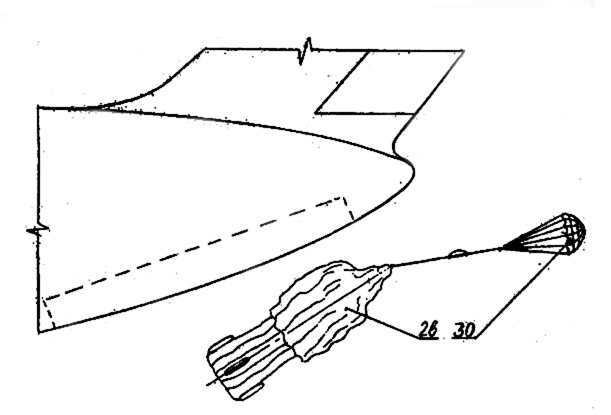
Рис. 4
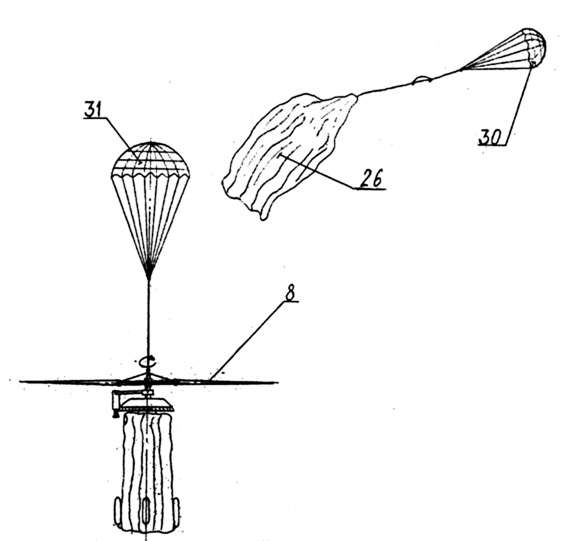
Рис. 5
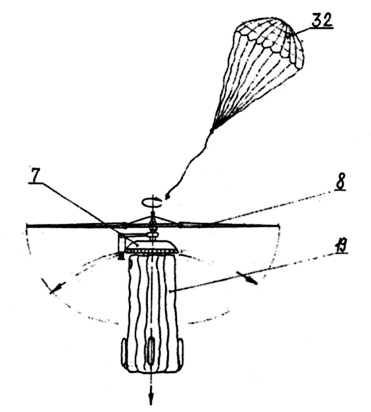
Рис. 6
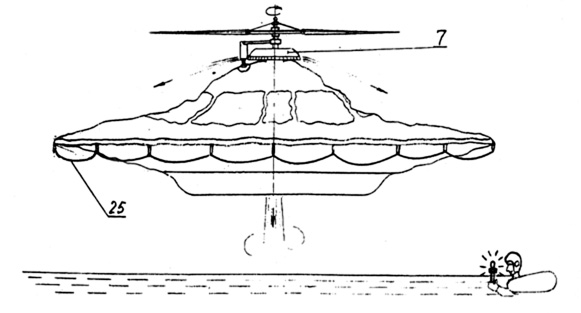
Рис. 7
Работа аппарата в зоне бедствия. Аппарат работает следующим образом.
При получении сигнала SOS в зону терпящих бедствие высылается самолет службы спасения или вертолет, имеющий на борту вышеназванный десантируемый спасательный аппарат (аппараты) в сложенном виде в чехле (рис. 3).
Над предполагаемым местом аварии, согласно штурманским данным и сигналам аварийного маяка, производится сброс аппарата. Отделившись от транспортного самолета (вертолета) или другого транспортного средства, аппарат принудительно при помощи вытяжного фала выпускает сначала стабилизирующий 30, затем первый тормозной парашют 31 парашютной системы 28, которые гасят скорость и стремятся перевести аппарат в вертикальное положение (рис. 4). На борту десантируемого спасательного аппарата после получения сигналов от датчиков вертикальной скорости и ориентации в пространстве включается система пеленга радиомаяка, принадлежащего терпящим бедствие (рис. 5). Посредством пироразьемов отстреливается транспортировочный чехол, и производится отцепка стабилизирующего 30 и первого тормозного 31 парашютов. Это приводит к освобождению механизма раскладки 22 и лопастей воздушного винта 8 с поворотным шарниром 29. К поворотному шарниру 29 прикреплен второй тормозной парашют 32, который гасит скорость до получения команды от датчиков вертикальной скорости на раскладку лопастей воздушного винта 8 посредством механизма раскладки 22.
Механизм раскладки 22 производит раскладку лопастей воздушного винта 8 при отсутствии вращения втулки 23 относительно оси аппарата до фиксации лопастей воздушного винта 8 в заданном положении. После завершения раскладки лопастей воздушного винта 8 втулка 23 получает возможность вращения от действия набегающего потока на лопасти воздушного винта 8 в режиме авторотации.
Авторотирующий воздушный винт 8 передает вращающий момент на редуктор 11. С редуктора 11 через обгонную муфту и муфту переключения вращающего момента вращение передается на вал двигателя 12, далее раскручивает вал двигателя 12, и при числе оборотов, равном числу оборотов холостого хода двигателя, включается топливная автоматика и система зажигания двигателя. Двигатель 12 запускается. При росте оборотов двигателя 12 его момент передается через редуктор 11 на вал 9 трансмиссии воздушного винта 8 и на вал 10 трансмиссии воздушного ускорителя 7. Воздушный ускоритель 7, отбрасывая массы воздуха под определенным углом к вертикали совместно с отбрасываемыми массами, создаваемыми авторотирующим воздушным винтом 8, создает подъемную силу, замедляющую свободное падение аппарата вплоть до минимальных скоростей. По данным высотомера и датчика вертикальной скорости снижения включается система наполнения эластичного каркаса аппарата 2, 3, и производится подача теплого воздуха от двигателя 12 в пространство между эластичными оболочками. Аппарат, уменьшив вертикальную скорость снижения, производит отцепку (сброс) второго тормозного парашюта 32 парашютной системы 28
(рис. 6) и приобретает заданную теорией форму. Воздушный поток, вырываясь из воздушного ускорителя 7, обтекает верхнюю часть двояковыпуклого куполообразного эластичного корпуса 1 и в соответствии с эффектом Коанда создает подъемную силу.
Управление аппаратом при его спуске производится путем отклонения авторотирующего воздушного винта 8 по тангажу и крену аппарата; таким образом в целом аэродинамический спектр обтекания аппарата изменяется. Управление и ориентация аппарата по курсу обеспечивается рассогласованием числа оборотов воздушного ускорителя 7 и складного воздушного винта противоположного вращения 8.
При наведении аппарата в зону нахождения пострадавших авторотирующий воздушный винт 8 управляется сервоприводами по сигналам системы автоматизированного управления и наведения 14 на основе принципа комплексирования инерциальных навигационных систем со спутниковыми навигационными и корреляционно-экстремальными системами навигации по геофизическим полям Земли. Одним из ориентиров при наведении спасательного аппарата на зону бедствия является аварийный маяк, находящийся в зоне пострадавших, который излучает световой сигнал и радиочастотные импульсы широкого спектра. Ориентируясь на конечном этапе полета на аварийный маяк, аппарат производит приводнение на надувной торообразный амортизатор – баллонет 18 в непосредственной близости от терпящих бедствие. Один из пострадавших, имеющий наибольший запас сил и энергии, держась за силовые спасательные поручни, взбирается на борт аппарата, вскрывает люк 34 и проникает внутрь аппарата. Далее пострадавший занимает рабочее место в раскладном кресле 16 и переводит в рабочее положение телескопическую ручку управления аппаратом 15. Двигатель 12 аппарата работает, а часть горячего воздуха от компрессора двигателя 12 идет непосредственно в обе герметичные полости двояковыпуклого куполообразного эластичного корпуса 1 для обогрева. При этом поступает сигнал на отключение автоматической системы управления 14 и обеспечивается переход на ручное управление, т.е. посредством телескопической ручки управления 15. Одновременно автоматически аппарат устанавливает устойчивую двухстороннюю радиосвязь с ближайшими судами, самолетами и вертолетами, принявшими сигнал SOS и спешащими на помощь терпящим бедствие людям.
Манипулируя ручкой управления 15 (тангаж – крен) и ее поворотной частью (газ) вокруг оси ручки, используя рычаг корректировки курса, пострадавший перемещает аппарат с возможностью его отрыва от поверхности воды к другим пострадавшим, находящимся в воде и подбирает их. Такое перемещение обеспечивается наклоном воздушного винта 8 в нужную сторону и созданием в эту сторону пропульсивной силы. При этом воздушный винт 8 через муфту переключения вращающего момента подключен к редуктору 11, и он, используя вращающий момент от двигателя 12, создает эту пропульсивную силу.
В перечень спасательного оборудования аппарата входит специальное устройство – улавливатель, которое в походном положении уложено в экваториальной части аппарата и подвергается всем деформациям укладки аппарата в походное положение. Перевод в рабочем положении улавливателя производится за счет использования давления воздуха, получаемого в компрессоре силовой установки. При этом эластичный обод улавливателя, наполняясь воздухом, удаляется от аппарата, на определенной (2.5 м) глубине расправляя специальную сетку под пострадавшим, находящимся на водной поверхности, что позволяет выловить его, приблизить к борту аппарата и затем поднять его на борт аппарата без его каких-либо действий и усилий.
Пройдя по акватории и собрав пострадавших, которых на борт можно взять ограниченное количество, аппарат ложится в дрейф, экономя горючее для обогрева внутреннего объема корпуса 1 и ожидая прибытия спасательных судов. При этом воздушный ускоритель 7, расположенный соосно со складным воздушным винтом 8 противоположного вращения, посредством муфты от двигателя 12 отключаются. В таком варианте десантируемый спасательный аппарат превращается в отапливаемый спасательный плот.
В другом варианте аппарат с пострадавшими на борту перемещается по воде в заданном спасателями направлении для встречи с ними.
Третий вариант при незначительном удалении места происшествия от находящихся судов и суши с очень малой загрузкой аппарата пострадавшими предусматривает отрыв аппарата от водной поверхности и перелет его на судно или сушу.
Выводы
Принципиальные технические решения, заложенные в данном проекте, могут быть использованы в легких летательных аппаратах вертикального взлета и посадки, беспилотных летательных аппаратах, несущих аппаратуру обзора и выдачи целеуказаний; при создании дешевых и компактных мини- и микро-БЛА, запускаемых с борта самолета или вертолета, участвующих в разовых войсковых операциях.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ДЕСАНТИРУЕМЫЙ СПАСАТЕЛЬНЫЙ АППАРАТ // Современные наукоемкие технологии. – 2013. – № 12. – С. 23-29;URL: https://top-technologies.ru/ru/article/view?id=33590 (дата обращения: 23.04.2024).