



В настоящей статье исследуется пятизвенный механизм с перекатывающимся рычагом, представленный на рис. 1, который состоит из кривошипа 1, шатуна 2, коромысла 3 и звена с высшей кинематической парой 4. При вращении кривошипа 1 выходное звено 4 (перекатывающийся рычаг) обкатывается по неподвижному звену 5 (опоре).
Решение задачи о положениях механизма будем производить графическим методом.
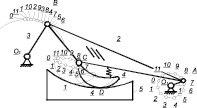
Рис. 1. Пятизвенный механизм с перекатывающимся рычагом
Положение ведущего звена, определяемое углом φ2, и все размеры звеньев будем считать заданными. Для построения траектории движения точек звеньев зададим кривошипу 1 полный оборот против часовой стрелки и простроим 12 положений механизма. Радиусом, равным длине звена О1А, проводим окружность β, представляющую собой траекторию точки А. Разбиваем окружность β на 12 равных частей и отмечаем положения 0,1,2,3… точки А. Для построения траектории движения точки В из О2 проводим окружность γ радиусом О2В, представляющую собой геометрическое место точек В для 0,1,2,3… положений ведущего звена 1. От каждого соответствующего положения точек А и В находим 12 положений точки С, последовательно соединив которые, получаем траекторию точки С. Для некоторых положений механизма приведены положения выходного звена 4. Чтобы обеспечить гарантированный контакт между перекатывающимся рычагом 4 и опорой 5, установлен упругий элемент [1, с. 141].
Определение скорости точек звеньев будем осуществлять графо-аналитическим методом. Вектор скорости  точки А известен. Векторные уравнения для скорости точки В имеют следующий вид:
точки А известен. Векторные уравнения для скорости точки В имеют следующий вид:  ;
;  . От полюса р (рис. 2) откладываем в произвольно выбранном масштабе вектор скорости
. От полюса р (рис. 2) откладываем в произвольно выбранном масштабе вектор скорости  , через точку а проведем прямую, перпендикулярную к направлению АВ, как направление относительной скорости
, через точку а проведем прямую, перпендикулярную к направлению АВ, как направление относительной скорости  .
.
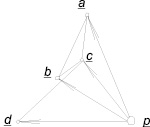
Рис. 2. Определение скорости точек звеньев механизма
Далее из полюса р проведем прямую, перпендикулярную к направлению О2В, на пересечении ее с  отметим точку в. Скорость
отметим точку в. Скорость  точки С определим, используя условие подобия фигур плана скоростей и плана механизма. Для определения вектора
точки С определим, используя условие подобия фигур плана скоростей и плана механизма. Для определения вектора  скорости точки D, из полюса р проведем прямую, параллельную направлению касатальной к опоре 5 в точке D. Проведя из точки с прямую, перпендикулярную к направлению СD, на пересечении ее с касательной в точке D найдем точку d. Таким образом можно найти скорости точек звеньев в любом из положений механизма [1, с.150].
скорости точки D, из полюса р проведем прямую, параллельную направлению касатальной к опоре 5 в точке D. Проведя из точки с прямую, перпендикулярную к направлению СD, на пересечении ее с касательной в точке D найдем точку d. Таким образом можно найти скорости точек звеньев в любом из положений механизма [1, с.150].
Двигаясь из положения 0 в положение 6, перекатывающийся рычаг 4 в состоянии перемещать тело посредством сил трения между опорой 5 и звеном с высшей кинематической парой 4 (лента).
Библиографическая ссылка
Баклушин А.A., Максимова Е.Н. КИНЕМАТИКА ПЯТИЗВЕННОГО ПЛОСКОГО МЕХАНИЗМА С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ // Современные наукоемкие технологии. – 2013. – № 8-2. – С. 257-257;URL: https://top-technologies.ru/ru/article/view?id=32170 (дата обращения: 19.04.2024).