



Рациональные значения угла θ входа пальца в почву и угла δ установки пальца к горизонту в точке максимального заглубления являются основанием для определения основных параметров сепарирующего диска. Палец kb диска погружен в почву на глубину h и установлен под углом θ скалывания почвы касается поверхности поля. Радиусы ob и oa диска крепления пальцев перпендикулярны к ним в точках b и а. В рассматриваемой схеме ∆oac ~ ∆сеm, а ∠aoc = ∠cem, тогда
∠aoc = α + θ.
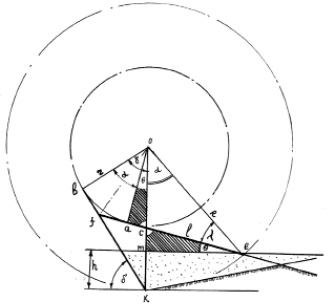
К определению технологических параметров сепарирующего диска ротационного культиватора
Из ∆bok имеем:
∠= bok = δ.
Так как по построению
∠aoc = ∠boc,
то
δ = α + θ.
В этом случае вертикальный радиус проходит через центр диска и точку К. Для заданной глубины h обработки почвы и параметрам треугольника moe, справедливо равенство:

Откуда

Заменяя α его значением), получаем:

или

Полученное ранее уравнение для определения угла δ позволяет записать:

тогда угол между пальцами равен:

Из уравнения найдем количество пальцев на диске:
или

Для определения радиуса диска крепления пальцев рассмотрим ∆kob.
Из соотношения его сторон определяем радиус r:
�� = R cos δ.
Заменяя R его конструктивными и технологическими параметрами, получаем:

Углы δ и α заменяем их значениями:
и

Тогда для радиуса r диска крепления пальцев будет справедливо равенство

После преобразования получаем расчетную формулу для определения радиус r

Длину пальца L определим из соотношения сторон ∆foa и ∆aoe:
L = fe = fa + ae.
Из ∆aof определяем fa

а из ∆aoс определяем ae

тогда
L = ��tg + R cos.
Так как

а λ = θ + φ.
То длину пальца определяем как
 :
:
Полученные механико-математические зависимости и детерминированные обоснования предложенной схемы являются исходной предпосылкой для методики технологического расчета и проектирования диска культиватора.
Выводы
Для проектирования ротационного культиватора предложены расчетные уравнения и технологическая схема взаимосвязи между его параметрами.
Библиографическая ссылка
Анутов Р.М., Котельников В.Я., Козявин А.А., Котельников А.В., Тищенко Д.Е. МЕХАНИКО-ТЕХНОЛОГИЧЕСКОЕ ОБОСНОВАНИЕ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ СЕПАРИРУЮЩЕГО ДИСКА КУЛЬТИВАТОРА // Современные наукоемкие технологии. – 2012. – № 12. – С. 10-11;URL: https://top-technologies.ru/ru/article/view?id=31117 (дата обращения: 20.04.2024).